
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1027 productos disponibles)













 Ready to Ship
Ready to Ship













































































 Ready to Ship
Ready to Ship






































 Ready to Ship
Ready to Ship



























Un servo de robot con rotación de 360 grados es un dispositivo utilizado para controlar los movimientos de los robots. Funciona cambiando la posición de un componente en el robot a través de un sistema de engranajes y motores. Este dispositivo es importante ya que garantiza la precisión y exactitud de los movimientos del robot. Existen diferentes tipos de servos de robot de 360 grados, que incluyen:
Servos analógicos
Los servos analógicos son uno de los tipos comunes de servos de robot de 360 grados. Utilizan un potenciómetro para medir la posición del eje del motor. La señal de control que entra en el servo es proporcional a la posición del motor. Esto significa que cualquier cambio en la señal de control llevará a un cambio en la posición del motor. Son simples y económicos. Sin embargo, son menos precisos y tienen una respuesta más lenta en comparación con otros servos.
Servos digitales
Los servos digitales son versiones avanzadas de los servos analógicos. Utilizan un microprocesador para procesar la señal de control. Esto los hace más precisos y les da un tiempo de respuesta más rápido. El microprocesador también puede realizar cálculos complejos, lo que ayuda a mejorar el desempeño del servo. Además, los servos digitales tienen una mayor resolución, lo que los hace más precisos. También son más confiables porque no se ven afectados por el ruido eléctrico.
Servos lineales
Los servos lineales son un tipo de servo de robot de 360 grados que proporciona un movimiento en línea recta. Se utilizan cuando el robot necesita moverse en una dirección lineal. Los servos lineales funcionan utilizando un mecanismo de tornillo para convertir el movimiento rotacional del motor en movimiento lineal. Esto significa que la rotación del motor mueve el eje del motor hacia adelante y hacia atrás. Los servos lineales pueden ser servos lineales continuos que proporcionan un movimiento ilimitado o servos lineales limitados con una distancia de movimiento fija.
Servos de rotación continua
Los servos de rotación continua son otro tipo de servo de robot de 360 grados. Están diseñados para rotar continuamente en ambas direcciones, horario y antihorario. Este tipo de servos no tiene un alcance específico de movimiento. Se utilizan en aplicaciones donde se requiere una rotación continua, como en las ruedas de robots.
Al elegir un servo de robot para un proyecto, deben considerarse múltiples factores para asegurar que el servo cumpla con los requisitos del proyecto. En primer lugar, debe considerarse el rango de rotación del motor servo. Para aplicaciones que necesitan una rotación completa de 360 grados, los servos de rotación continua son ideales. Sin embargo, para tareas que requieren posiciones angulares específicas, un servo estándar o de rotación posicional sería más apropiado. En segundo lugar, la capacidad de torsión del servo es esencial, especialmente cuando el robot tiene que cargar cargas adicionales. En este caso, un servo de alto par sería más adecuado. Además, la velocidad del motor servo debe considerarse para lograr el nivel deseado de rapidez en los movimientos robóticos. Este criterio de selección se puede lograr a través de un análisis cuidadoso de las especificaciones del motor y los requisitos de la aplicación prevista.
Además, el mecanismo de control del servo de robot juega un papel vital en la determinación de la precisión y la exactitud de los movimientos. Por lo tanto, los sistemas de servo de bucle cerrado son ideales para aplicaciones que requieren altos niveles de precisión, ya que proporcionan retroalimentación para un mejor control. También es crucial la compatibilidad del motor servo con los otros componentes del sistema robótico. En este caso, se necesita considerar los sistemas de control y la fuente de alimentación para garantizar una integración fluida.
Además, la durabilidad y la calidad de construcción del motor servo deben considerarse, especialmente en aplicaciones que exponen el motor a condiciones adversas. En tales casos, los engranajes de metal y la carcasa sellada son ideales, ya que mejoran la longevidad del motor. Por último, el costo del motor servo también debe tenerse en cuenta. Esto se debe a que los servos de alta gama con características avanzadas pueden ser más costosos, pero valen la pena la inversión para aplicaciones críticas. Al considerar estos factores, se puede tomar una decisión bien informada al elegir un servo de robot para un proyecto.
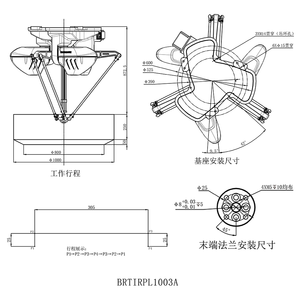
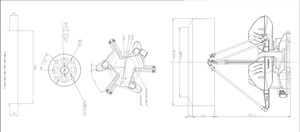
El diseño de un servo de robot con rotación de 360 grados consiste en varios componentes cruciales que contribuyen a su funcionalidad y rendimiento. Estos incluyen el motor, el conjunto de engranajes, el sensor de retroalimentación, la circuitería de control, la carcasa y el eje de salida. El motor es el componente central responsable de impulsar la rotación del servo. Convierte la energía eléctrica en energía mecánica, produciendo movimiento rotacional. El conjunto de engranajes multiplica el par generado por el motor y lo transfiere al eje de salida. También aumenta la precisión de los movimientos del servo. Los sensores de retroalimentación proporcionan información sobre la posición actual del servo a la circuitería de control. Aseguran un posicionamiento preciso y detectan discrepancias entre la posición deseada y la real. La circuitería de control procesa las señales de los sensores de retroalimentación y envía comandos al motor, regulando su velocidad y dirección. La carcasa protege los componentes internos del polvo y los desechos y proporciona integridad estructural al servo. Además, ayuda a disipar el calor generado durante la operación. El eje de salida está conectado a la carga o mecanismo que necesita ser rotado. Transfiere el movimiento rotacional producido por el servo a la aplicación externa.
Los servos de robot tienen muchas funciones y características que los hacen versátiles para diferentes aplicaciones. Una de las características principales es el rango de rotación. Los servos de robot rotativos están disponibles tanto en tipos de rotación continua como de 360 grados. Los servos de rotación continua pueden girar en ambas direcciones sin límites. Se utilizan en aplicaciones que requieren rotación ilimitada, como en las ruedas de robots seguidores de línea. Por otro lado, los servos rotativos de 360 grados ofrecen rotación continua y son ideales para tareas que demandan movimientos repetitivos. Otra característica importante es la relación de engranajes. Los servos con altas relaciones de engranajes ofrecen un aumento del par en el eje de salida. Además, proporcionan un control preciso sobre el movimiento rotacional. Esto los hace adecuados para tareas de levantamiento pesado, como en brazos robóticos. Los servos con bajas relaciones de engranajes tienen velocidades más altas pero menor par. Son mejores para aplicaciones que requieren movimientos rápidos.
La capacidad de los servos de robots para cambiar de dirección es otra característica. Los servos pueden cambiar su dirección de rotación, permitiéndoles moverse hacia adelante o hacia atrás. Esta característica es importante para aplicaciones como vehículos robóticos en giros o al navegar alrededor de obstáculos. Los servos también vienen con potenciómetros incorporados que proporcionan retroalimentación sobre la posición actual del eje de salida. El mecanismo de retroalimentación asegura que los servos estén posicionados con precisión. Los servos también están diseñados con circuitería de control que regula la operación del motor y procesa los comandos del controlador. La circuitería es esencial para un control fluido y preciso de los movimientos del servo.
La seguridad y calidad de los servos de robot son importantes para determinar su rendimiento y durabilidad. Los compradores deben considerar lo siguiente:
Q1: ¿Qué es un servo de robot con rotación de 360 grados?
A1: Un servo de robot es un dispositivo que ayuda a los robots y máquinas a mover sus partes y realizar diversas acciones. Es como un músculo para los robots. Los servos vienen en diferentes tipos, como rueda, engranaje y bola, y controlan el movimiento del robot al hacer que gire, rote o cambie de dirección.
Q2: ¿Qué es un servo de robot con rotación de 360 grados?
A2: Un servo de robot con rotación de 360 grados es un dispositivo que ayuda a los robots a moverse y girar. Es como un músculo para los robots que les permite mover diferentes partes, como ruedas o brazos. Los servos están hechos de varios tipos, como rueda, engranaje y bola, y controlan el movimiento del robot al hacer que rote o cambie de dirección.
Q3: ¿Cómo elegir un servo de robot con rotación de 360 grados?
A3: Uno debe considerar el tipo de proyecto, el peso que el servo debe cargar, el voltaje que necesita y el método de control. También es esencial observar la velocidad y el par requeridos para el proyecto y asegurarse de que el servo sea de buena calidad y tenga garantía.
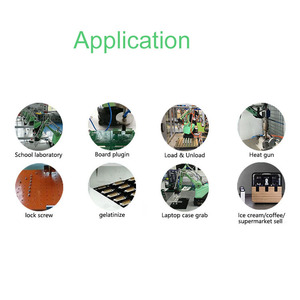
Q4: ¿Cuáles son las aplicaciones de un servo de robot con rotación de 360 grados?
A4: Un servo de robot se utiliza en diversos campos, como en máquinas y dispositivos que ayudan a las personas, como equipo hospitalario, herramientas de fabricación y máquinas de construcción.






