Tipos de controladores de vuelo de cuadricóptero Arduino
El controlador de vuelo de cuadricóptero Arduino es el cerebro informático que controla el cuadricóptero. Recopila datos de varios sensores y ayuda a dirigir y controlar el cuadricóptero. Estos son algunos de los controladores de vuelo populares que los fabricantes pueden crear utilizando placas Arduino, y se pueden clasificar como de código abierto o propietarios:
- Controladores de vuelo de código abierto:
Estos controladores de vuelo tienen software disponible públicamente. El software se puede modificar y adaptar para ajustarse a requisitos o preferencias especiales. Algunos de los beneficios de los controladores de código abierto son que pueden adaptarse y crecer con el usuario, tienen costos más bajos, suelen ser más asequibles que los controladores propietarios, tienen una gran comunidad de usuarios y desarrolladores que ofrecen soporte, recursos y documentación más accesibles, y que permiten a los usuarios aprender y experimentar con las tecnologías de drones.
Hay muchas opciones de software de código abierto para controladores de vuelo para elegir, como ArduPilot, PX4, OpenPilot y MWC (MultiWii). Cada uno de ellos tiene características, funcionalidades y hardware admitido únicos. Al elegir uno, los fabricantes deben considerar los requisitos específicos de su proyecto y el hardware que planean utilizar.
- Controladores de vuelo propietarios:
Estos son controladores de vuelo cuyo software está cerrado y no se puede modificar. A veces, el software del controlador de vuelo está licenciado al fabricante y puede clasificarse como semi-propietario. Las ventajas de los controladores propietarios son que ofrecen el rendimiento, la estabilidad y la confiabilidad esperados porque el proveedor los utiliza y prueba en la producción real. También ofrecen soporte profesional y, a menudo, son más adecuados para aplicaciones empresariales y aquellas que requieren soporte y servicios profesionales.
Los controladores pueden no adaptarse y evolucionar según los requisitos del usuario. Los casos pueden no ajustarse a diferentes variantes de hardware y la documentación puede no ser muy detallada. Esto puede limitar la utilidad del controlador para diferentes casos de uso. Algunos controladores propietarios ofrecen potencial de integración y provienen de proveedores que pueden integrar sus controladores de vuelo con otros componentes de manera económica y eficiente, mejorando así la funcionalidad general.
Los controladores de vuelo propietarios se pueden clasificar en tipos básicos y avanzados. Los controladores de vuelo básicos tienen una funcionalidad mínima. Son rentables y muy adecuados para proyectos con presupuesto limitado. Los controladores de vuelo avanzados tienen más funciones y pueden manejar tareas y misiones más complicadas. Vienen equipados con más hardware (procesadores potentes, sensores adicionales, etc.) y son más caros.
Funciones y características del controlador de vuelo de cuadricóptero Arduino
Las funciones y características de los controladores de vuelo Arduino para cuadricópteros pueden variar ampliamente según el modelo y el fabricante. Los controladores de vuelo son componentes vitales de un dron, y sus funciones principales son controlar el movimiento y la orientación del dron en vuelo.
Aquí hay algunas características y funciones comunes que uno podría esperar encontrar en los controladores de vuelo de cuadricóptero Arduino:
- Integración GPS: Algunos controladores de vuelo de cuadricóptero pueden tener funcionalidad GPS, lo que permite la navegación básica, el vuelo por puntos de referencia, la funcionalidad de regreso a casa y las capacidades de geocercado.
- Modo de seguridad y regreso a casa: Los controladores de vuelo deben tener mecanismos de seguridad que detecten caídas de voltaje de la batería o pérdida de señal para garantizar un aterrizaje seguro. Los controladores más avanzados pueden incluir la funcionalidad RTH que devuelve automáticamente el dron a su punto de despegue en caso de pérdida de señal o batería baja.
- Antitrozamiento y antivibración: Los controladores avanzados tienen mecanismos antitrozamiento y antivibración que estabilizan el dron en el aire para evitar el enredo con otros objetos.
- Mantenimiento de altitud: Esta función permite que el dron mantenga su altitud automáticamente sin que el piloto ajuste continuamente el acelerador. El controlador de vuelo con un sensor de altitud puede detectar y mantener la altitud actual.
- Interfaz de control remoto: El controlador de vuelo de cuadricóptero está diseñado para que los usuarios puedan ajustar los parámetros de vuelo, los sensores de calibración y la configuración a través de una interfaz de control remoto como una aplicación complementaria o un software de estación terrestre.
- Diseño compacto: La mayoría de los controladores de vuelo de cuadricóptero vienen con un diseño compacto para una fácil integración en el dron, minimizando el espacio.
- Peso y tamaño: El peso y el tamaño del controlador de vuelo son importantes a considerar, ya que pueden afectar el tamaño y el peso general del cuadricóptero, lo que a su vez afecta su rendimiento de vuelo y capacidad de carga.
- Fusión de sensores: Los controladores de cuadricóptero avanzados tienen capacidades de fusión de sensores donde los datos de varios sensores se combinan para un control de vuelo y estabilidad mejorados.
- Latencia: La velocidad de procesamiento del controlador de vuelo puede afectar la latencia o el retraso en la respuesta a las entradas del piloto. Los controladores de menor latencia brindan un vuelo más sensible para un mejor control.
- Software y ajuste: Esta función permite que el controlador se ajuste correctamente para ajustar las características de vuelo y optimizar el rendimiento para que coincida con los requisitos específicos.
- Fuente de alimentación: El controlador de vuelo generalmente requiere su propia fuente de alimentación de la batería del cuadricóptero. Los compradores deben asegurarse de que el voltaje de la fuente de alimentación sea compatible con las especificaciones del controlador.
Aplicaciones de los controladores de vuelo de cuadricóptero Arduino
Se espera que el mercado de los cuadricópteros se expanda rápidamente, alcanzando los 7.319,95 millones de USD para 2027, con una tasa de crecimiento anual compuesta del 12,18% de 2023 a 2027. Esto destaca la creciente importancia de la industria de los drones, que abarca diversas aplicaciones como el mercado de exploración y aventura, fotografía y videografía aéreas, topografía y cartografía, cine y inspección y monitoreo. Todas estas aplicaciones son un testimonio de la versatilidad y la funcionalidad de los drones, lo que lleva al auge de este mercado competitivo. Esto también significa la importancia de comprender las diferencias entre los helicópteros RC y los cuadricópteros, ya que brinda información sobre sus diferentes funcionalidades. Juntos, estos mercados representan una industria multimillonaria que emplea y apoya a miles de empleados y empresas en todo el mundo, enfatizando la importancia de los sectores industrial, recreativo y comercial del mercado de drones.
- Control de precisión: El controlador de vuelo Arduino ofrece un control preciso sobre los cuadricópteros, lo que garantiza maniobras de vuelo estables y precisas. Esto es crucial para aplicaciones como fotografía aérea, topografía, inspección y monitoreo, donde se requiere un posicionamiento preciso y un vuelo estable. Los algoritmos y sensores del controlador de vuelo permiten un control preciso de la actitud, posición y velocidad del cuadricóptero, permitiéndole realizar maniobras complejas con precisión. Esto asegura que la carga útil, como cámaras o sensores, pueda capturar imágenes de alta calidad, realizar una cartografía precisa y monitorear infraestructuras críticas con precisión.
- Vuelo autónomo: Con un controlador basado en Arduino, los cuadricópteros se pueden programar para seguir rutas de vuelo predefinidas o completar tareas automatizadas. Esto es beneficioso para aplicaciones como cartografía, topografía, misiones de búsqueda y rescate y tareas de inspección, donde se requieren maniobras de vuelo repetitivas o complejas. La capacidad de vuelo autónomo permite al cuadricóptero ejecutar la misión programada con precisión y consistencia, reduciendo la necesidad de intervención manual. Esto ahorra tiempo, mejora la eficiencia y minimiza el error humano en estas aplicaciones.
- Integración de sensores: Los controladores de vuelo Arduino pueden integrar varios sensores (GPS, altímetros, brújulas, etc.) para habilitar funciones como el mantenimiento de altitud, la navegación por puntos de referencia y el geocercado. La integración de sensores mejora las capacidades del cuadricóptero, permitiéndole realizar funciones de vuelo avanzadas. Por ejemplo, el receptor GPS permite la navegación por puntos de referencia, donde el cuadricóptero puede volar automáticamente a ubicaciones predeterminadas basadas en coordenadas GPS. El sensor de altímetro permite el mantenimiento de altitud, lo que mantiene al cuadricóptero a una altura estable durante el vuelo. El sensor de brújula proporciona información de rumbo para la navegación y orientación. Estos sensores trabajan juntos para proporcionar datos precisos para los algoritmos del controlador de vuelo, mejorando la navegación, la estabilidad y el rendimiento general del cuadricóptero.
- Manejo de emergencias: Algunos controladores de vuelo ofrecen funciones como una función de regreso a casa, estabilización GPS y modos de seguridad para garantizar un funcionamiento seguro en caso de emergencias o pérdida de señal. Estas funciones de manejo de emergencias son cruciales para mantener la seguridad e integridad del cuadricóptero durante situaciones inesperadas. La función de regreso a casa permite que el cuadricóptero vuele automáticamente de regreso a su punto de partida basado en su posición GPS cuando detecta una batería baja, pérdida de señal u otras emergencias. La estabilización GPS ayuda a estabilizar la posición del cuadricóptero utilizando datos GPS en caso de pérdida de control, asegurando que se mantenga flotando de forma segura en su lugar. Los modos de seguridad activan acciones predeterminadas para proteger el cuadricóptero y sus alrededores, como aterrizar de forma segura o maximizar la batería.
Cómo elegir controladores de vuelo de cuadricóptero Arduino
Al seleccionar un controlador de vuelo Arduino para un cuadricóptero de bricolaje, es esencial considerar varios factores críticos que pueden afectar significativamente el rendimiento general, la funcionalidad y la experiencia del usuario.
- Comprender los requisitos del proyecto: Antes de comprar cualquier componente, es esencial comprender y determinar los requisitos del proyecto. ¿Qué tipo de dron, vehículo RC o cuadricóptero se está fabricando? ¿Qué tamaño planean hacer usando las hélices y el marco? Estimar el peso ayudará a saber cuánto peso puede soportar el controlador de vuelo.
- Giroscopio y acelerómetro: Un controlador de vuelo con un giroscopio y un acelerómetro (IMU) es esencial para un vuelo estable de multirrotor. El sensor IMU detectará la orientación, el movimiento y la rotación para mantener el dron estable al volar. Asegúrese de elegir un controlador de vuelo con un IMU de buena calidad para un control estable.
- Conectividad y compatibilidad: Evalúe las opciones de conectividad y las interfaces del controlador. Asegúrese de que tenga los puertos e interfaces necesarios para conectar todos los componentes previstos (sensores, actuadores, módulos de comunicación, etc.). Verifique la compatibilidad con otras piezas basadas en Arduino y asegúrese de una integración fluida.
- Potencia de procesamiento y memoria: Considere la potencia de procesamiento y la capacidad de memoria del controlador de vuelo. Asegúrese de que tenga suficientes recursos para ejecutar el software y los algoritmos necesarios sin problemas. Un controlador de vuelo capaz puede procesar datos de sensores de forma rápida y precisa.
- Funcionalidad multipropósito: Si está buscando un controlador versátil que haga más que solo control de vuelo, considere uno con múltiples funciones. Algunos controladores de vuelo se pueden usar en robots u otros vehículos. Al trabajar en diversas aplicaciones, uno puede ahorrar dinero y mantener las cosas simples, teniendo solo un tipo de controlador.
- Software, firmware y compatibilidad con receptor R/C: Elija un controlador de vuelo que ofrezca software fácil de usar para la configuración y el ajuste. Verifique si admite plataformas de desarrollo de software y firmware de código abierto. También asegúrese de que el controlador de vuelo sin barra de torsión sea compatible con transmisores y receptores RC.
Controlador de vuelo de cuadricóptero Arduino Q&A
P1: ¿Cuáles son los beneficios de usar un controlador de vuelo basado en Arduino?
A1: Un controlador de vuelo basado en Arduino ofrece flexibilidad, personalización, una gran comunidad de apoyo y rentabilidad en comparación con los controladores de cuadricóptero listos para usar.
P2: ¿Cuáles son los desafíos de usar un controlador basado en Arduino?
A2: Algunos de los desafíos pueden incluir una complejidad de configuración adicional, la curva de aprendizaje pronunciada para principiantes, hardware limitado en comparación con los controladores comerciales y la necesidad de integrar más componentes individualmente.
P3: ¿Se puede utilizar un controlador de vuelo basado en Arduino en cualquier cuadricóptero?
A3: Sí, el controlador se puede utilizar en cualquier cuadricóptero siempre que cumpla con los requisitos en términos de peso y potencia. También se puede utilizar en otras configuraciones de drones, como hexacópteros y octópteros.
P4: ¿Es posible actualizar un controlador de vuelo basado en Arduino?
A4: Sí, un usuario puede actualizar el controlador descargando e instalando un nuevo firmware. La actualización del controlador puede proporcionar funciones adicionales, rendimiento mejorado y funcionalidad mejorada.
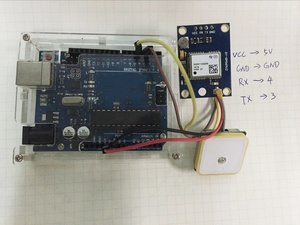
P5: ¿Cómo se conecta el controlador de vuelo Arduino a otros componentes del dron?
A5: El controlador de vuelo Arduino tiene varios puertos de entrada/salida. Se puede conectar a otros componentes utilizando conectores eléctricos, cables soldados o un sistema de bus. El cableado adecuado garantiza que el controlador pueda recibir datos de los sensores y enviar comandos a los motores.






































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4