
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(370 productos disponibles)





















 Ready to Ship
Ready to Ship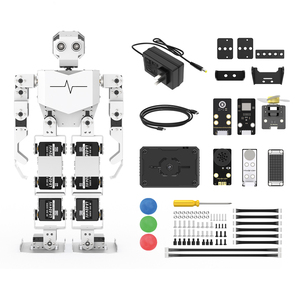
 Ready to Ship
Ready to Ship
































 Ready to Ship
Ready to Ship






 Ready to Ship
Ready to Ship


















 Ready to Ship
Ready to Ship











































































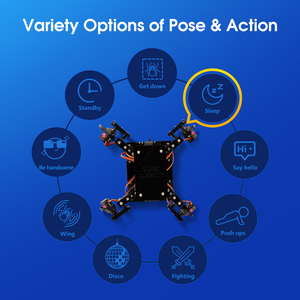
Un robot de andar Arduino tiene patas y utiliza motores para moverse. El robot puede ir hacia adelante, hacia atrás o cambiar de dirección. Utiliza un microcontrolador para controlar el movimiento y tiene sensores que le ayudan a navegar. Hay diferentes tipos de robots de andar Arduino, incluyendo:
Robots bípedos de andar
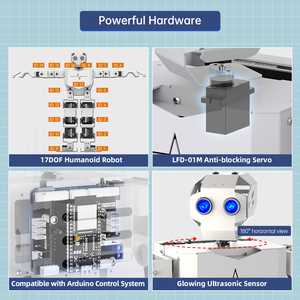
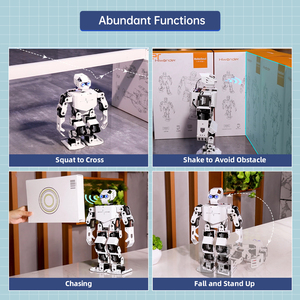
Los robots bípedos de andar tienen dos patas y se mueven como los humanos. Tienen articulaciones en las caderas, las rodillas y los tobillos. Las articulaciones tienen servos que permiten al robot doblar y mover las piernas. Los robots bípedos pueden levantar una pierna y moverla hacia adelante, al igual que una persona. Pueden caminar, correr, patear una pelota o bailar. Los robots bípedos de andar se fabrican utilizando placas Arduino, sensores y motores. La placa Arduino controla cómo el robot mueve sus piernas. Le dice a los motores y servos qué hacer. Los sensores ayudan al robot a saber qué hay delante de él. Los robots bípedos se utilizan para enseñar a los niños sobre los robots. También se utilizan para probar nuevas tecnologías que ayudan a las personas con prótesis de piernas.
Robots cuadrúpedos de andar
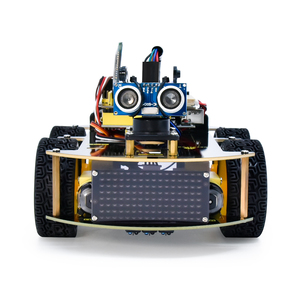
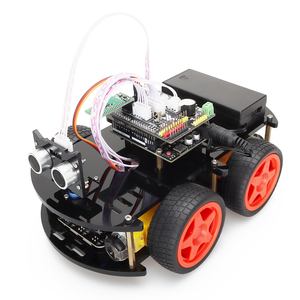
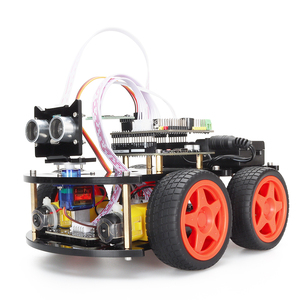
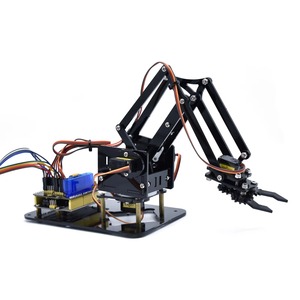
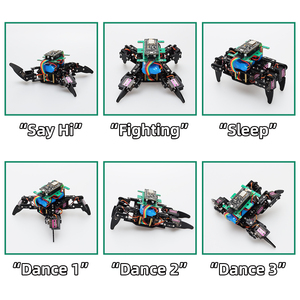
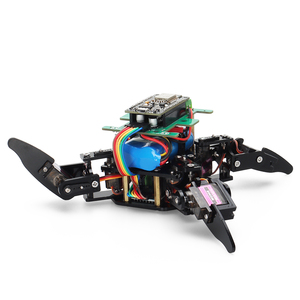
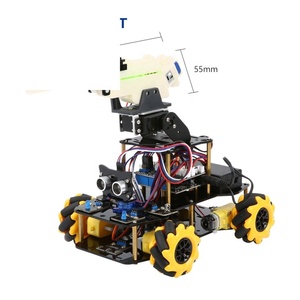
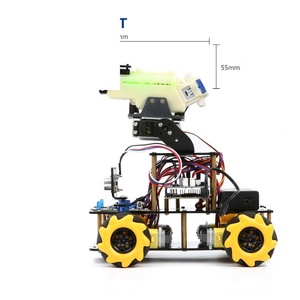
Los robots cuadrúpedos de andar tienen cuatro patas, al igual que los perros, los gatos y otros animales. Utilizan muchos servomotores para controlar cada pierna. Los servomotores están conectados a las patas del robot mediante cables largos llamados cables. Esto permite al robot mover sus piernas de muchas maneras. Los robots cuadrúpedos de andar pueden arrastrarse, correr o cambiar de dirección rápidamente. Se fabrican utilizando una pequeña computadora llamada microcontrolador. El microcontrolador le dice a los servomotores cómo mover las piernas. Utiliza sensores para ver lo que hay alrededor del robot. Los robots cuadrúpedos se utilizan para ayudar a las personas a aprender a programar computadoras y reparar cables eléctricos.
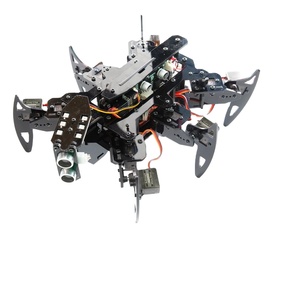
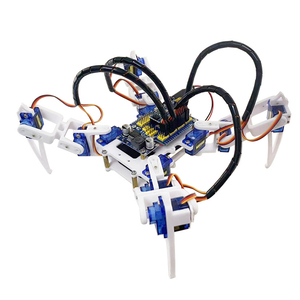
Robots hexápodos de andar
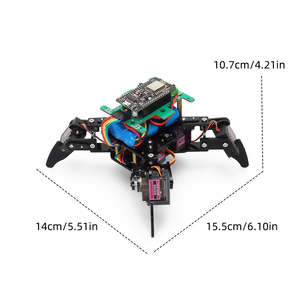
Los robots hexápodos tienen seis patas. Cada pata tiene su propio motor que controla cómo se mueve. Los robots hexápodos pueden caminar de muchas maneras diferentes. Pueden moverse en círculos o ir hacia atrás. Estos robots se fabrican utilizando un microcontrolador que controla los motores. Utiliza sensores para ayudar al robot a saber a dónde va. Los robots hexápodos de andar se utilizan para ayudar a los estudiantes a aprender sobre la codificación y cómo construir máquinas.
Propósito
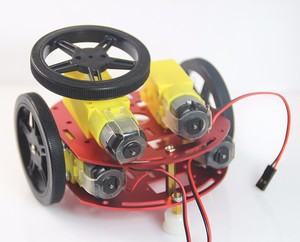
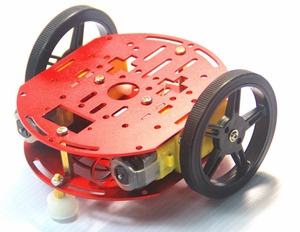
Determinar el propósito del robot de andar es crucial en la fase de diseño y construcción. Los componentes necesarios difieren dependiendo de si el robot está destinado a la diversión, la educación o la investigación. Los robots más simples destinados al placer utilizan principalmente placas Arduino, motores y ruedas. El objetivo de estos robots es divertirse jugando o realizando actividades entretenidas. Los robots que están construidos para ser educativos utilizan sensores y más piezas para que uno pueda aprender sobre la tecnología y cómo funciona. Los robots basados en la investigación se crean para ayudar a descubrir nueva información y, por lo tanto, pueden requerir piezas y programación complejas.
Diseño y Tipo
Al diseñar un robot de andar, primero se debe identificar el tipo de robot que uno quiere crear. Esto se puede hacer decidiendo si el robot debe parecerse a un animal, un humano o una máquina. Después de esto, uno tiene que averiguar la forma y las partes del cuerpo del robot. Esto incluye el tipo de patas que tendrá el robot y los materiales que se utilizarán para hacerlas.
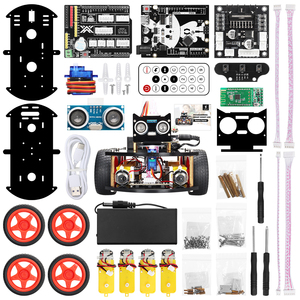
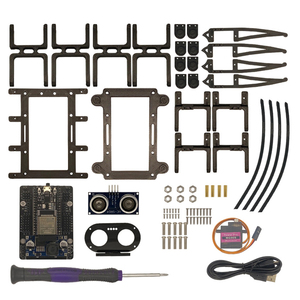
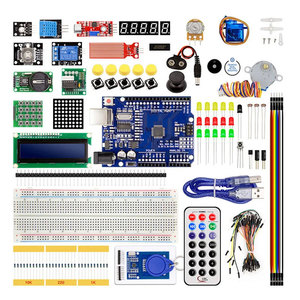
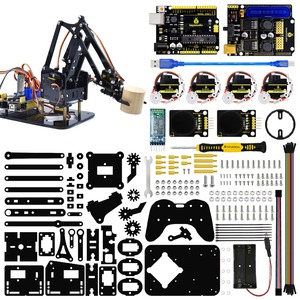
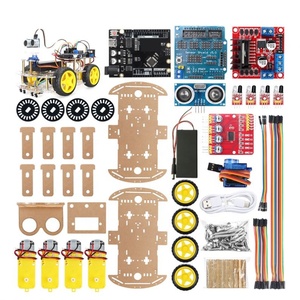
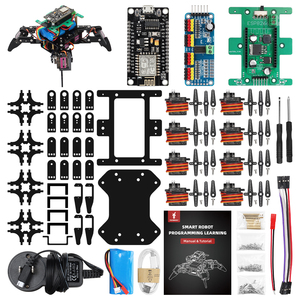
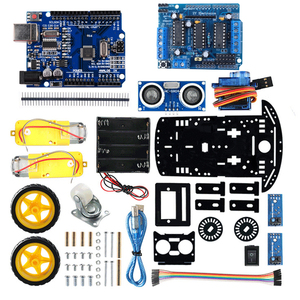
Componentes y Materiales
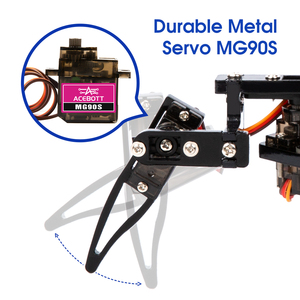
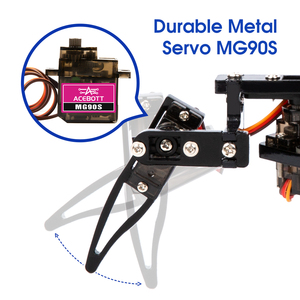
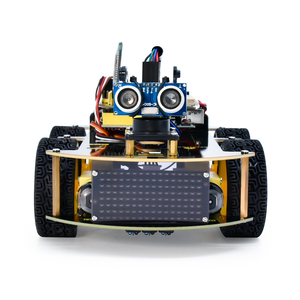
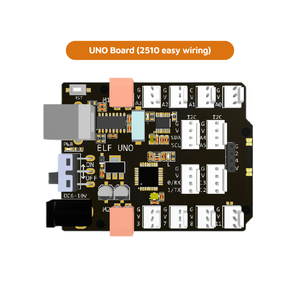
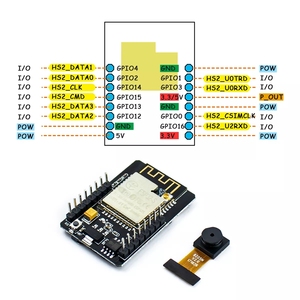
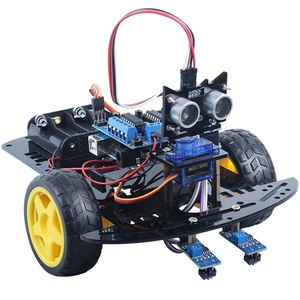
Los componentes y materiales son las cosas que hacen que el robot se mueva y haga cosas diferentes. Algunas de las cosas básicas que uno necesita son placas Arduino, motores y ruedas. La placa Arduino actúa como el cerebro del robot, diciéndole qué hacer. Los servomotores y los motores de CC son los que hacen que el robot se mueva controlando las ruedas o las piernas. Las ruedas son las piernas de los robots cuando uno decide hacer un robot con ruedas. Otras partes que pueden ser necesarias incluyen sensores, ruedas y diversas piezas electrónicas. Los materiales utilizados para hacer el cuerpo del robot pueden ser plástico, metal o madera, dependiendo del tipo de robot y su diseño.
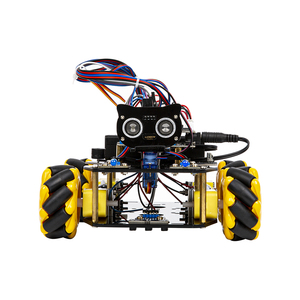
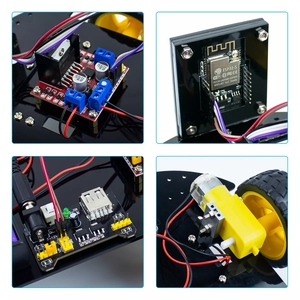
Fuente de alimentación
La fuente de alimentación es lo que le da energía al robot para que pueda funcionar. Las baterías son la fuente de energía más común para los robots de andar porque son portátiles y fáciles de usar. El tipo de baterías que se van a utilizar depende del voltaje y de cuánto tiempo debe funcionar el robot. Algunos robots utilizan baterías recargables porque se pueden cargar y utilizar de nuevo cuando se agotan.
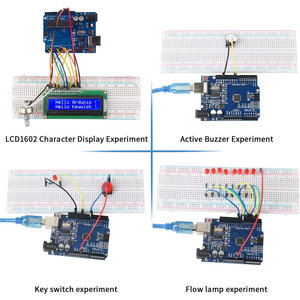
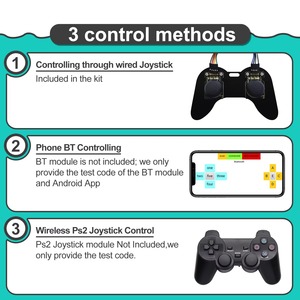
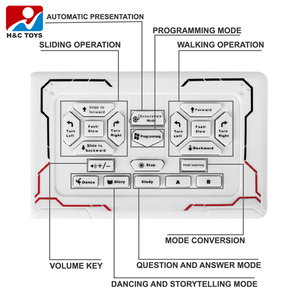
Programación y Control
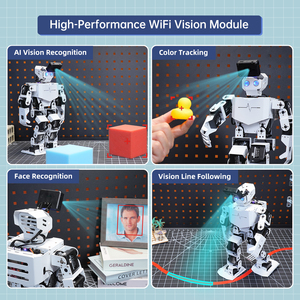
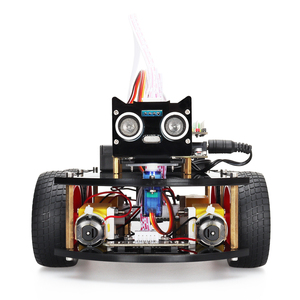
Los robots construidos para la educación utilizan sensores y más piezas para que uno pueda aprender sobre la tecnología y cómo funciona. Estos robots pueden sentir cosas a su alrededor, como obstáculos o sonidos. Los sensores envían esta información a la placa Arduino, que le dice al robot qué hacer. La codificación es importante para hacer estos robots, ya que ayuda a uno a controlar lo que hace el robot y cómo responde a las cosas que siente.
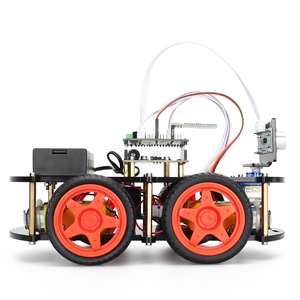
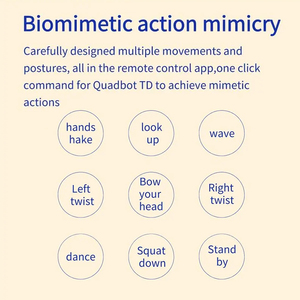
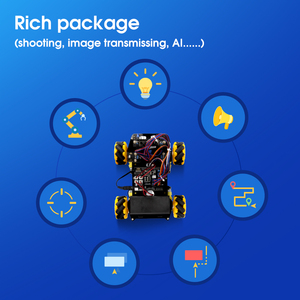
Los robots de andar Arduino son una manifestación de la tecnología moderna que combina funcionalidad, características y un diseño innovador para crear plataformas versátiles para el aprendizaje, la exploración y la creatividad. Estos robots, impulsados por microcontroladores Arduino, sirven para diversos propósitos, incluyendo la educación, la investigación y el entretenimiento. Ofrecen un rico conjunto de funcionalidades, que permiten a los usuarios programarlos para caminar, girar y realizar otras acciones, fomentando el aprendizaje práctico en robótica y programación.
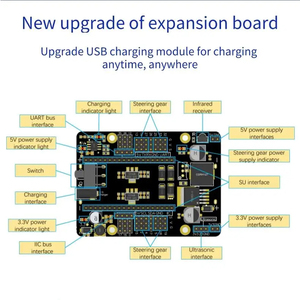
Su diseño, caracterizado por la modularidad y la adaptabilidad, permite la personalización y la escalabilidad, atendiendo tanto a principiantes como a entusiastas avanzados. Con la posibilidad de incorporar diversos sensores, actuadores y componentes, estos robots pueden adaptarse a aplicaciones específicas, promoviendo la resolución de problemas y la innovación. Además, su construcción robusta, junto con características como opciones de alimentación y interfaces de comunicación, garantiza la fiabilidad y la durabilidad, apoyando diversos usos tanto en entornos interiores como exteriores.
Además, la integración de elementos avanzados como el aprendizaje automático y la inteligencia artificial abre nuevas vías para un comportamiento inteligente y la automatización, mejorando su utilidad en la investigación y la experimentación. La amalgama de estos aspectos posiciona a los robots de andar Arduino como una herramienta valiosa en el panorama educativo, facilitando la adquisición de habilidades prácticas en campos STEM y fomentando un espíritu de curiosidad y creatividad. A medida que la tecnología continúa evolucionando, estos robots prometen mayores avances, ofreciendo posibilidades ilimitadas para la exploración y la innovación.
P1: ¿Qué son los robots de andar Arduino?
R1: Los robots de andar Arduino son máquinas en miniatura que utilizan una placa Arduino para controlar sus movimientos, lo que les permite caminar y realizar diversas tareas.
P2: ¿Cuál es el propósito de Arduino en los robots de andar?
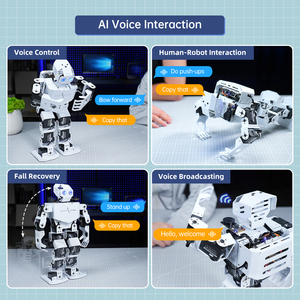
R2: Arduino proporciona el sistema de control para los robots de andar, permitiendo una fácil programación y una gestión precisa de los sensores y motores para un caminar suave y una ejecución de tareas.
P3: ¿Son personalizables los robots de andar Arduino?
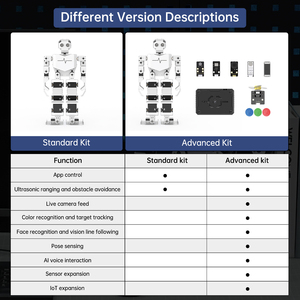
R3: Sí, los robots de andar Arduino son altamente personalizables en diseño, funcionalidad y programación para satisfacer las necesidades y preferencias específicas del usuario.
P4: ¿Cuál es el valor educativo de los robots de andar Arduino?
R4: Los robots de andar Arduino ofrecen un aprendizaje práctico en robótica, codificación e ingeniería, haciendo que los conceptos complejos sean comprensibles a través de la experiencia práctica.
P5: ¿Cuáles son las aplicaciones de los robots de andar Arduino?
R5: Los robots de andar Arduino tienen diversas aplicaciones, incluyendo la educación, la investigación, el entretenimiento y la tecnología de asistencia, adaptándose a diversas tareas y entornos.



















