Tipos de Controlador de Vuelo Omnibus F4
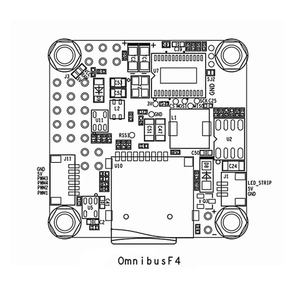
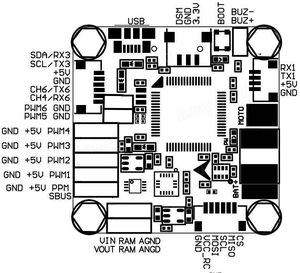
Un controlador de vuelo Omnibus F4 es un controlador de vuelo basado en el chip F4. Se utiliza comúnmente en drones, y sus características incluyen un OSD integrado y un puerto de zumbador de audio, entre otros. Hay varios tipos de controladores de vuelo bajo la marca Omnibus. Incluyen los siguientes;
-
Omnibus F4 V5.3
El Omnibus F4 V5.3 presenta un microprocesador, OSD integrado y un sensor de corriente. Utiliza un controlador PID y tiene el firmware Betaflight preinstalado. El controlador de vuelo admite BLHeli32 y amortiguación de pila de amortiguación hidráulica. También tiene giroscopios amortiguados y filtrados para reducir los efectos del ruido y la vibración. La placa tiene un S.Port de enlace y vuelo de 6 pines para telemetría SmartPort. Los usuarios pueden conectar el receptor directamente al controlador de vuelo.
-
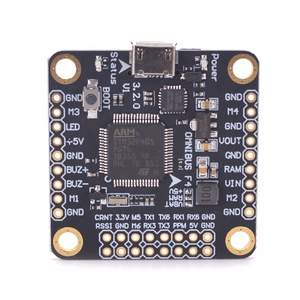
Omnibus F4 Pro V3
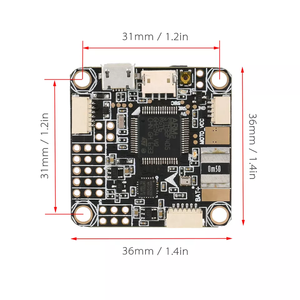
Este controlador de vuelo Omnibus tiene una versión más nueva de la CPU STM32F405. También se ha actualizado para usar MCU 2400Khz. Los orificios de montaje del controlador de vuelo tienen un tamaño de 3 mm y una forma circular. Los usuarios pueden intercambiar la salida de 5 V entre la cámara y el receptor. Tiene firmware de vuelo limpio de 32 bits, y los usuarios pueden usar un adaptador FTDI para facilitar el flasheo del firmware. Conectar el controlador de vuelo a una fuente de alimentación USB lo encenderá automáticamente.
-
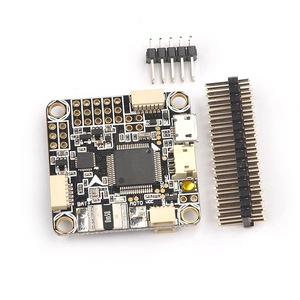
Omnibus F4 Pro V2
El Omnibus F4 Pro V2 tiene un procesador STM32F405 y funciona con Betaflight. Tiene un OSD BetaFlight integrado. El controlador de vuelo y el OSD se ejecutan en conjuntos de chips separados para una mejor calidad de video. También tiene giroscopio de montaje suave y sensor de corriente. Es posible montar la placa con los orificios de montaje redondos de 3 mm. Los usuarios deben actualizar el firmware para obtener más funciones y un mejor rendimiento. Se puede usar un adaptador FTDI para actualizar el firmware y configurar el controlador de vuelo.
-
Omnibus F4 Pro V6
Este modelo tiene un nuevo diseño que reduce el ruido y la vibración. Viene con un enchufe CAM de 10/16MP, lo que permite a los usuarios conectar varios tipos de cámaras de drones diferentes. El controlador de vuelo tiene un pin dedicado para la señal de audio de la cámara. Utiliza BLHeli 32 y Betaflight para una fácil programación y configuración. También tiene una telemetría betaflight con un puerto inteligente. Los usuarios pueden recibir telemetría utilizando un S.PortP.
-
Omnibus F4 Nano SR
Este controlador de vuelo es para drones pequeños y tiene un tamaño de 20 x 20 mm. Tiene un procesador de vuelo F405, un giroscopio de 610 Hz, un puerto USB de velocidad completa y un firmware BLHeli_S. El nano funciona bien en un rango de temperatura entre -10 y 85 grados. Solo pesa 5 gramos.
Funciones y características
-
Comprobación previa al vuelo:
Los usuarios pueden verificar la configuración del controlador, la calibración del sensor, la detección de orientación y la dirección del motor. Algunos controladores Omnibus tienen un botón dedicado para ingresar a la verificación previa al vuelo. Al presionar el botón, los usuarios pueden ver los resultados parpadeando y saber que todo está bien, o solucionar cualquier problema antes de volar.
-
Ajuste PID:
La sintonización 'Proporcional Integral Derivativa' (PID) es esencial para ajustar las características de vuelo de un dron o modelo de avión. El controlador de vuelo Omnibus proporciona control en tiempo real a través de la sintonización PID para mantener una trayectoria de vuelo estable. El controlador de vuelo ajusta continuamente las superficies de control o los motores utilizando algoritmos PID. Esto compensa cualquier desviación de la actitud o altitud deseada y garantiza un control de vuelo suave y estable. Omnibus también tiene ajuste PID sobre la marcha que permite a los usuarios realizar ajustes en vivo a los parámetros PID durante un vuelo. Puede ayudar a ajustar finamente el comportamiento de vuelo del dron en diferentes condiciones.
-
Manejo de falla de seguridad:
El manejo de falla de seguridad del controlador Omnibus reacciona en caso de pérdida de señal o falla importante. El controlador puede devolver el dron a un estado seguro. Los usuarios pueden programar el comportamiento de falla de seguridad para especificar acciones como regresar a casa, aterrizar o flotar. Garantiza la seguridad del dron y evita que se pierda o se dañe. Los usuarios también pueden configurar la configuración de falla de seguridad para que se adapte a sus preferencias y condiciones de vuelo.
-
ESCs inteligentes:
Los controles electrónicos de velocidad o ESC son vitales para convertir la energía de la batería y controlar la velocidad del motor. Los controladores Ominbus recientes tienen ESC inteligentes que pueden hacer más. Se comunican directamente con el controlador de vuelo. El controlador ajusta la velocidad y la potencia del motor para un rendimiento óptimo. Los usuarios también pueden monitorear el rendimiento y la temperatura del motor con los ESC inteligentes. Los controladores Omnibus también proporcionan telemetría. Los usuarios pueden recibir datos en tiempo real sobre el estado del motor, la batería y el controlador de vuelo. Esta información ayuda a detectar problemas a tiempo y tomar medidas correctivas. Los ESC inteligentes mejoran la confiabilidad y la seguridad general del dron.
-
Soporte de zumbador y LED:
Algunos controladores de vuelo Omnibus tienen soporte de zumbador y LED. Los usuarios pueden usar el zumbador para alertas audibles y notificaciones sobre indicadores de estado de vuelo importantes, advertencias, errores o estado del sistema. El controlador de vuelo puede controlar el zumbador para producir diferentes tonos o patrones para transmitir información. Las luces LED integradas sirven como un indicador visual del estado del dron durante el vuelo. El controlador de vuelo puede tener luces LED programables. Estos patrones de luz pueden mostrar información variada, incluido el nivel de voltaje de la batería, el estado del GPS, el modo de vuelo y los códigos de error. Se vuelve fácil evaluar la condición del dron de un vistazo.
Escenarios del Controlador de Vuelo Omnibus F4
En el caso de un controlador de vuelo Omnibus, el F4 se utiliza ampliamente en aplicaciones como drones GPS, plataformas FPV suaves, drones de ala fija y drones de carreras.
- Drones GPS: Los controladores de vuelo Omnibus con sistemas de sensores avanzados y capacidades de procesamiento pueden habilitar capacidades de vuelo autónomo, navegación por puntos de referencia y estabilización para drones que utilizan el posicionamiento del Sistema de Posicionamiento Global (GPS).
- Plataformas FPV suaves: Los controladores Omnibus que cuentan con IMUs integrados y filtros complementarios pueden proporcionar plataformas de cámara estables y suaves para carreras de vista en primera persona (FPV) o fotografía aérea, asegurando una captura de video estable incluso durante maniobras dinámicas.
- Drones de ala fija: Algunos controladores de vuelo Omnibus están diseñados para funcionar con aeronaves de ala fija, habilitando la estabilización, las funciones de piloto automático y la navegación por puntos de referencia para vuelos de largo alcance y una cobertura más eficiente de áreas extensas en aplicaciones como cartografía, topografía o agricultura.
- Drones de carreras: El controlador de vuelo Omnibus proporciona procesamiento de alta velocidad, latencia mínima y algoritmos de vuelo avanzados para habilitar un control ágil y receptivo para drones utilizados en eventos de carreras competitivas.
Cómo elegir un controlador de vuelo Omnibus F4?
Hay algunas cosas a considerar al elegir un controlador de vuelo Omnibus.
Primero, verifique la compatibilidad del controlador con el dron. El FC Omnibus viene en varias formas y tamaños, así que busque uno que se ajuste al dron. Muchos controladores tienen un encabezado de pines o un diseño de almohadilla que coincide con los controladores de vuelo comunes.
En segundo lugar, considere el estilo de vuelo. Los controladores de vuelo Omnibus están diseñados para estilos de vuelo determinados. Por ejemplo, el controlador de modo Acro es ideal para acrobacias aéreas y drones deportivos. El controlador de modo de altitud funciona bien con drones de cámara. Para lograr el rendimiento deseado, utilice el controlador adecuado.
Luego, examine las características. Busque un controlador con los sensores y funciones necesarios. La IMU y el magnetómetro son cruciales para la estabilidad del vuelo. Los controladores con capacidades GPS pueden realizar misiones autónomas y determinar la ubicación. Muchos controladores también tienen barómetros y sonares para ayudar con la retención de altitud y la detección de obstáculos. Asegúrese de que el controlador tenga las opciones de conectividad como la telemetría y el PWM.
Finalmente, verifique el firmware. Asegúrese de que el controlador admita una actualización de firmware. Las opciones de firmware comunes son Cleanflight, Betaflight y KISS. Elija uno que funcione mejor con el FC Omnibus. Estas opciones ofrecen una gran flexibilidad y ajuste de rendimiento. Independientemente del firmware que se elija, busque uno con una interfaz de configuración fácil.
Preguntas y respuestas
P1: ¿Cómo funciona un controlador de vuelo Omnibus?
A1: Utilizando una unidad de medición inercial (IMU) con un algoritmo complejo, el FC toma muchas entradas del sensor para mantener un vuelo estable y controlar la actitud y la dirección de la aeronave. El controlador ejecuta esto dirigiendo con los motores y enviando comandos al piloto o piloto automático.
P2: ¿Qué significa OSD en los controladores de vuelo?
A2: OSD significa Pantalla en pantalla, una característica que tienen algunos controladores de vuelo Omnibus que muestra información importante como el voltaje de la batería, el tiempo de vuelo, la velocidad y la altitud en la alimentación de video enviada a las gafas o monitor FPV (Vista en primera persona).
P3: ¿Cuál es la ventaja de usar el FC4 en los controladores de vuelo?
A3: El uso del controlador INAV Omnibus F4 FC4 mejora el control de los drones durante el vuelo a bajas temperaturas, lo que extiende el período en el que se puede utilizar el dron. Este controlador también hace que el dron sea más estable durante el despegue, reduciendo las posibilidades de un accidente.
P4: ¿Es ilegal usar un controlador de vuelo Omnibus?
A4: No, usar este controlador no es ilegal. Sin embargo, para usarlo comercialmente, uno debe cumplir con las regulaciones y leyes locales que rigen los controladores de vuelo y los drones. Estas leyes ayudan a proteger a las personas y el espacio aéreo y aseguran que el uso de un controlador de vuelo no los afecte adversamente.














































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4