Tipos de controladores de vuelo Betaflight para cuadricópteros
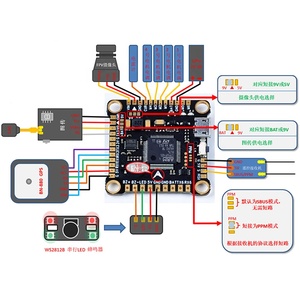
Un controlador de vuelo Betaflight para cuadricópteros gestiona las tareas de vuelo de drones de carreras, quads y otras aeronaves modelo. Utiliza una IMU (unidad de medida inercial) con acelerómetros y giroscopios para detectar los movimientos del dron en el aire. Luego, ajusta la velocidad de cada motor para mantener una trayectoria de vuelo estable.
Si bien las características específicas pueden variar, muchos controladores de vuelo para cuadricópteros vienen con módulos GPS y software que les permiten realizar patrones de vuelo automatizados o funciones de regreso a casa. Estos controladores están diseñados para tiempos de respuesta rápidos, lo que los hace ideales para aplicaciones de carreras.
Estos son los diferentes tipos de controladores de cuadricópteros:
- Carrera: Este es un controlador de vuelo pequeño y sencillo para corredores multirrotor. Tiene menos funciones, pero está ajustado para la velocidad y la respuesta.
- Código abierto: Los controladores de código abierto permiten cargar firmware personalizado, como Betaflight u OpenPilot. Ofrecen la mayor flexibilidad y son buenos para los aficionados que desean cambiar la configuración o agregar funciones.
- GPS: Los controladores GPS utilizan señales GPS para habilitar modos de vuelo avanzados como misiones de puntos de referencia, despegue y aterrizaje automatizados y mantenimiento de altitud. Por lo general, son controladores más grandes con más sensores.
- Sistemas integrados: Algunos controladores de vuelo vienen integrados con otros componentes como radios de telemetría, módulos GPS o placas de distribución de energía. Estos sistemas todo en uno simplifican el cableado, pero ofrecen menos flexibilidad a la hora de elegir piezas individuales.
- Sistemas de piloto automático: Los controladores de vuelo de piloto automático están hechos para drones que necesitan realizar misiones automatizadas. Tienen una gran duración de la batería, redundancia y múltiples interfaces de control (como estaciones terrestres).
- Fácil de usar para principiantes: Los controladores de vuelo centrados en los principiantes están listos para usar con configuraciones básicas. Tienen un software fácil de usar para una fácil configuración y solución de problemas. Las funciones como el mantenimiento de la altitud, las señales de advertencia y las telemetrías ayudan a los nuevos pilotos a aprender a volar.
- Sensores avanzados: Algunos FC montan profesionales porque tienen sensores más avanzados (como sensores Lidar o de flujo óptico) que son útiles para aplicaciones científicas). Estos sensores pueden ayudar al dron a volar con mayor estabilidad en condiciones exteriores difíciles.
Funciones y características
Los controladores de vuelo compatibles son importantes para los drones Betaflight. Es el software que ejecuta la placa del controlador del cuadricóptero. Proporciona funciones que mejoran el rendimiento y facilitan el vuelo.
Es posible que los usuarios ajusten la configuración a través de la interfaz de usuario con los controladores de vuelo de drones que tienen funciones como:
- Ajuste PID: Esta función ayuda a los usuarios a ajustar la estabilidad y la capacidad de respuesta del cuadricóptero a su gusto.
- Modos: Los diferentes modos de vuelo permitirán a los usuarios volar con diferentes niveles de habilidad.
- Telemetría: Esta función puede enviar datos de vuelta al transmisor del usuario. Esto incluye el voltaje de la batería, la intensidad de la señal y las advertencias, por mencionar algunas.
- Geocerca: Esta función de seguridad avanzada opcional proporcionará restricciones sobre la altitud máxima y la distancia para evitar riesgos.
- Rescate GPS: Puede devolver un dron a su posición de origen con la ayuda de coordenadas GPS si pierde la conexión o está fuera de control.
- Caja negra: Muchos drones QAV 250 con controladores de vuelo vienen con esta función, que registra datos de vuelo para el análisis posterior al vuelo. Puede ayudar a los usuarios a comprender qué salió mal si el dron se estrella.
- Configuración fácil: Algunos controladores de vuelo facilitan la configuración del dron con instrucciones paso a paso en la interfaz del software.
- Compatibilidad: Se pueden volar diferentes tipos de cuadricópteros con controladores de vuelo compatibles con Betaflight. Estos incluyen cuadricópteros de carreras, multirrotores, alas y más.
Escenarios del controlador de vuelo Betaflight para cuadricópteros
Los controladores de vuelo Betaflight se utilizan ampliamente en diversas aplicaciones. Estos son algunos escenarios de uso comunes:
-
Fotografía y videografía aérea
Muchos fotógrafos y cineastas profesionales utilizan cuadricópteros para capturar impresionantes tomas aéreas que serían imposibles de lograr con cámaras tradicionales. Las funciones de vuelo estable de Betaflight aseguran movimientos de cámara suaves para obtener imágenes de alta calidad. Además, Betaflight permite ajustes del ángulo de la cámara durante el vuelo, lo que permite perspectivas de toma diversas.
-
Inspección industrial y topografía
Los cuadricópteros equipados con cámaras y sensores pueden inspeccionar tuberías, líneas eléctricas, turbinas eólicas y sitios de construcción. Las características de vuelo estable de Betaflight son cruciales para producir imágenes y datos claros en tales inspecciones.
-
Operaciones de búsqueda y rescate
En situaciones de emergencia, los cuadricópteros se pueden desplegar para localizar personas desaparecidas, evaluar desastres o entregar suministros. Las capacidades GPS de Betaflight permiten a los operadores establecer puntos de referencia para vuelos automatizados en patrones de búsqueda. Además, el control de vuelo estable garantiza un funcionamiento fiable incluso en condiciones desafiantes como vientos fuertes o baja visibilidad.
-
Cartografía y aplicaciones geoespaciales
Varias industrias utilizan cuadricópteros para crear mapas y modelos 3D para cartografía del terreno, monitoreo agrícola, construcción y estudios ambientales. El control de vuelo estable de Betaflight es importante para la coherencia y la precisión en las misiones de cartografía. Además, los operadores pueden utilizar el software de la estación terrestre para planificar rutas de vuelo, controlar el cuadricóptero en tiempo real y procesar los datos recopilados posteriormente para generar mapas y modelos.
-
Vuelo recreativo y carreras
Muchos entusiastas de los drones vuelan cuadricópteros por diversión o carreras competitivas. Betaflight ofrece diferentes modos de vuelo (como modo acro y modo estabilizado) adecuados para pilotos de diferentes niveles de habilidad. Los operadores pueden personalizar los parámetros para que coincidan con su estilo de vuelo o nivel de experiencia.
-
Monitoreo ambiental
Científicos e investigadores utilizan cuadricópteros para monitorear la calidad del aire, las condiciones climáticas, los hábitats de la vida silvestre, etc. El control de vuelo estable de Betaflight garantiza que los sensores puedan recopilar datos con precisión en diversos entornos. Además, las capacidades de largo alcance de algunos cuadricópteros permiten la recopilación remota de datos en áreas de difícil acceso.
Cómo elegir el controlador de vuelo Betaflight para cuadricópteros
-
Compatibilidad del sistema:
Considere si es un controlador de un solo sistema o de varios sistemas. Estos controladores son compatibles con varios sistemas de control de vuelo, incluido Betaflight. Asegúrese de que el sistema funcione con los cuadricópteros que se ofrecen a los clientes. Descubra la cantidad de sistemas que se pueden utilizar simultáneamente para cada versión del controlador.
-
Conectividad inalámbrica:
Examine las características de conectividad inalámbrica. Esto incluye capacidades como control de largo alcance y baja latencia. Determine si el controlador tiene conexiones inalámbricas como RF, 2.4 GHz, Wi-Fi, Bluetooth u otras. Explore el soporte del controlador para protocolos de comunicación inalámbrica como ELRS, Crossfire y otros más allá de Betaflight.
-
Funciones de control:
Observe las funciones de control. Este controlador presenta controles configurables como interruptores, deslizadores y diales. Sus experiencias de vuelo inmersivas instrumentales y modos de vuelo personalizables. Por lo tanto, considere sistemas con diseño ergonómico para un pilotaje cómodo y un control sensible.
-
Compatibilidad e integración:
Verifique la compatibilidad y las funciones de integración. Esto incluye garantizar una integración perfecta con Betaflight para una sintonización avanzada del rendimiento de vuelo. Asegúrese de que el producto sea compatible con los cuadricópteros que se venderán a los clientes. Examine las reseñas y calificaciones de los usuarios para evaluar el rendimiento y la confiabilidad. Busque productos de fabricantes de renombre conocidos por la calidad en la industria del RC.
-
Alcance y resolución:
Considere el alcance y la resolución de los controladores remotos. Evalúe el alcance efectivo del transmisor RC para asegurarse de que se adapte a las actividades de vuelo previstas. Examine las opciones de transmisor como 2.4 GHz u otras frecuencias para la compatibilidad con ELRS, Crossfire y sistemas similares. Tome nota de la resolución para un control preciso. Esto permite un pilotaje sensible y preciso.
-
Duración de la batería y durabilidad:
Evalúe la duración de la batería y la durabilidad del producto. La duración de la batería es importante para un tiempo de vuelo prolongado y disfrute. Asegúrese de que el controlador RC ofrezca una duración de batería suficiente para las necesidades de los usuarios. Considere la calidad de construcción y la duración de la batería. Opte por controladores con construcción duradera y duración de batería suficiente para soportar el uso frecuente en el campo.
-
Opciones de carga:
Explore las opciones de carga del controlador de vuelo Betaflight para cuadricópteros. Estos incluyen métodos de carga como USB, batería LiPo u otros. Determine si necesita algún adaptador para sus métodos de carga. Verifique el tiempo de carga para que los usuarios lo planifiquen. Evalúe la duración de la batería para su duración antes de necesitar una recarga. Esto asegura que los usuarios pasen más tiempo en el aire en lugar de cargar el controlador.
-
Limitaciones geográficas:
Tenga en cuenta las limitaciones geográficas. Esto incluye las regulaciones y restricciones de vuelo del cliente. Es crucial para el cumplimiento y los asuntos legales. Averigüe dónde se puede enviar cada controlador remoto. Esto garantiza el soporte al cliente para las garantías del producto.
Preguntas y Respuestas
P1: ¿A qué se refiere el ajuste PID y por qué es importante?
A1: El ajuste PID se refiere al ajuste de los parámetros de control del controlador de vuelo para optimizar el rendimiento para condiciones específicas. Es importante porque diferentes cuadricópteros pueden requerir ajuste para garantizar controles de vuelo estables y sensibles. Esta optimización adapta el comportamiento del cuadricóptero a sus características únicas, condiciones ambientales y casos de uso específicos, permitiendo el mejor rendimiento posible. Factores como el tamaño, la distribución del peso y las especificaciones del motor juegan un papel en la determinación de qué configuraciones de ajuste funcionarían mejor para un cuadricóptero en particular. Al personalizar estos controles, los usuarios pueden maximizar la estabilidad y la capacidad de respuesta en sus vuelos.
P2: ¿Cuántas versiones de firmware Betaflight hay?
A2: Hay cuatro versiones de firmware Betaflight: Betaflight 4.4, Crystalflight, Ghost y OpenTX. Betaflight 4.4 es la versión de firmware estable más reciente disponible. Los controladores Crystalflight ofrecen experiencias de vuelo suaves similares a las basadas en Betaflight. Ghost es conocido por su alta tasa de control de resolución, mientras que OpenTX proporciona una plataforma de código abierto flexible y personalizable para el controlador del usuario.
P3: ¿Qué papel juegan los sensores en los cuadricópteros?
A3: Los sensores son cruciales para determinar la orientación, la altitud, la velocidad y otros parámetros vitales del cuadricóptero. Proporcionan datos que el controlador de vuelo procesa para mantener un control de vuelo estable, navegar y realizar varias maniobras. Asegurar que los sensores funcionen correctamente es esencial para la seguridad y el éxito del vuelo. Básicamente, sin sensores que funcionen correctamente, un cuadricóptero no se puede controlar correctamente para lograr las trayectorias de vuelo deseadas.
P4: ¿Qué tipo de mantenimiento de la batería requiere un cuadricóptero?
A4: El mantenimiento de la batería para un cuadricóptero implica prácticas de carga adecuadas, condiciones de almacenamiento y controles periódicos del estado de la batería. Es esencial evitar la sobrecarga o descarga de las baterías y exponerlas a temperaturas extremas. Seguir estos pasos ayudará a los usuarios a garantizar una mayor duración de la batería.


































































































































































































































 浙公网安备 33010002000092号
浙公网安备 33010002000092号 浙B2-20120091-4
浙B2-20120091-4