All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(880 productos disponibles)









 Ready to Ship
Ready to Ship














 Ready to Ship
Ready to Ship
























 Ready to Ship
Ready to Ship






 Ready to Ship
Ready to Ship



























 Ready to Ship
Ready to Ship









 Ready to Ship
Ready to Ship














































































 Ready to Ship
Ready to Ship








 Ready to Ship
Ready to Ship











Existen diferentes tipos de motores servo de robot que se utilizan en combinación con placas Arduino. Incluyen;
Servos de Rotación Continua
Los servos de rotación continua son tipos especiales de servos que permiten una rotación continua de 360 grados. Son útiles para proyectos que implican movimiento hacia adelante y hacia atrás. Estos servos de rotación continua se utilizan para construir robots simples con Arduino. Utilizan un potenciómetro para la retroalimentación de posición; sin embargo, la posición no se controla en los servos de rotación continua. En cambio, estos servos controlan la velocidad y la dirección de la rotación. Los servos de rotación continua son ideales para aplicaciones como robots que siguen líneas, robots que evitan obstáculos y coches robóticos.
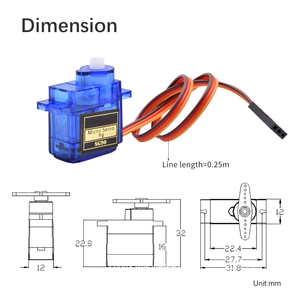
Motores Servo Micro
Los motores servo micro son dispositivos compactos y ligeros de tamaño pequeño y bajo peso. Son adecuados para controlar los movimientos de robots pequeños. Se utilizan en la construcción de pequeños robots basados en Arduino para el control de brazos, piernas u otras partes del cuerpo. Estos servos tienen un rango de movimiento limitado de alrededor de 180 grados. Se controlan mediante señales PWM de la placa Arduino, que determinan el ángulo de rotación. Los micro servos son ideales para aplicaciones como robots insecto, robots basados en Arduino Nano y otras máquinas pequeñas.
Motores Servo Inteligentes
Los motores servo inteligentes son dispositivos avanzados con sensores y mecanismos de retroalimentación incorporados. Se utilizan para controlar los movimientos de robots complejos. Los motores servo inteligentes se usan para construir robots controlados por Arduino de alta precisión que requieren altos niveles de automatización. Los servos inteligentes tienen giroscopios, acelerómetros y codificadores de posición incorporados. Ofrecen control preciso de la posición, control de la velocidad y control del par. Además, cuentan con Bluetooth y Wi-Fi para comunicación inalámbrica y transferencia de datos en tiempo real. Los motores servo inteligentes son ideales para aplicaciones como impresoras 3D, máquinas CNC, brazos robóticos y automatización industrial.
Elegir el motor servo de robot adecuado para Arduino es crucial para garantizar un rendimiento y funcionalidad óptimos en aplicaciones robóticas. Para seleccionar el motor servo apropiado para un proyecto de Arduino, se deben considerar varios factores. En primer lugar, se deben tener en cuenta los requisitos de la aplicación. El par, la velocidad y el rango de movimiento del motor servo deben alinearse con el uso previsto. Por ejemplo, se necesita un motor servo de alto par para levantar objetos pesados. Al mismo tiempo, un motor servo estándar es ideal para reducir armaduras y controlar posiciones.
El motor servo también debe ser compatible con la placa Arduino utilizada. No todos los motores servo funcionan con cada placa Arduino. Por lo tanto, es esencial verificar sus especificaciones y asegurar la compatibilidad. Además, se debe considerar el mecanismo de control del motor servo. Algunos motores servo requieren circuitos de control adicionales, mientras que otros pueden ser controlados directamente mediante las señales PWM de Arduino. Por lo tanto, es importante asegurarse de tener los componentes necesarios y el conocimiento para controlar eficazmente el motor servo seleccionado.
Además, el requerimiento de energía del motor servo es un factor esencial a considerar. Los diferentes motores servo tienen diferentes requerimientos de voltaje y corriente. Por lo tanto, se debe asegurar que la fuente de alimentación pueda soportar las necesidades del motor servo para evitar daños. La durabilidad y la calidad de construcción del motor servo también deben ser consideradas. Un motor servo bien construido tiene más probabilidades de soportar un uso riguroso y durar más, lo que lo convierte en una inversión valiosa.
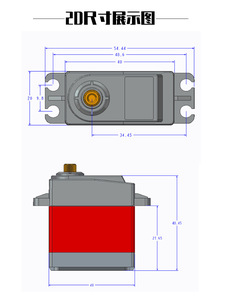
Adicionalmente, el rango de movimiento del motor servo es un factor esencial a considerar. Diferentes motores servo ofrecen diferentes rangos de movimiento, como rotación continua, 180 grados o 270 grados. Por lo tanto, es crucial elegir un motor servo con un rango de movimiento que satisfaga los requisitos del proyecto. El costo del motor servo también es una consideración significativa. Los motores servo están disponibles a diferentes precios. Por lo tanto, es necesario encontrar un equilibrio entre asequibilidad y calidad para asegurar el mejor valor posible. Finalmente, uno puede beneficiarse de leer reseñas y recomendaciones de otros usuarios para recopilar información sobre el rendimiento y la fiabilidad del motor servo que tiene intención de comprar.
Al considerar la seguridad y calidad de los motores servo de robot Arduino, es importante evaluar factores como la calidad de construcción, los materiales, la seguridad eléctrica y los mecanismos de protección. Aquí hay algunos puntos clave a considerar:
Calidad de Construcción
Una buena calidad de construcción asegura que el motor sea duradero y pueda soportar tensiones mecánicas. Una construcción sólida de la carcasa previene daños a los componentes internos.
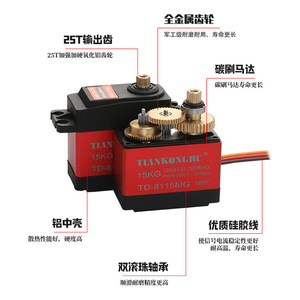
Materiales
Se deben utilizar materiales de alta calidad para la carcasa del motor, los engranajes y otros componentes. Esto asegura longevidad y mejor rendimiento.
Seguridad Eléctrica
El motor debe cumplir con los estándares de seguridad eléctrica para prevenir peligros como cortocircuitos, sobrecalentamiento y descargas eléctricas.
Mecanismos de Protección
Mecanismos de protección efectivos, como protección contra sobrecorriente, sobrevoltaje y térmica, ayudan a salvaguardar el motor y prolongar su vida útil.
Certificaciones
Las certificaciones de organizaciones respetables (como CE, RoHS y UL) indican que el motor ha sido probado para garantizar su seguridad y cumplimiento.
Control de Calidad
Los estrictos procesos de control de calidad durante la fabricación aseguran una calidad y rendimiento consistentes de los motores.
Reputación del Fabricante
La reputación del fabricante se basa en la entrega de productos de alta calidad y confiables. Esto contribuye a la seguridad y calidad del motor servo.
Directrices de Instalación y Uso
La instalación adecuada y seguir las pautas de uso del fabricante son críticas para garantizar la seguridad y el rendimiento óptimo del motor.
¿Qué es un motor servo de robot Arduino?
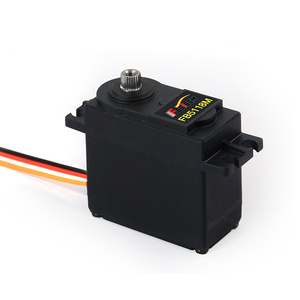
Un motor servo de robot es un dispositivo electromecánico que utiliza un mecanismo de retroalimentación para controlar la posición angular o lineal, la velocidad y la aceleración. Consiste en un motor acoplado a un sensor para retroalimentación de posición y un circuito de control que utiliza esta retroalimentación para ajustar el movimiento del motor, asegurando un control preciso y exacto. Los motores servo se utilizan comúnmente en robótica para aplicaciones como brazos, piernas y ojos, permitiendo que los robots realicen tareas con un alto grado de precisión y repetibilidad.
¿Puede Arduino controlar múltiples motores servo?
Sí, múltiples motores servo de Arduino se pueden controlar utilizando una sola placa Arduino. El número de servos que se pueden controlar depende del modelo de Arduino y de la biblioteca utilizada. Por ejemplo, el Arduino Uno puede controlar hasta 12 motores servo utilizando la biblioteca Servo y hasta 48 servos utilizando la biblioteca ServoTimer2. El Arduino Mega tiene un mayor número de salidas PWM y puede controlar más servos.
¿Cuánto duran las baterías de un motor de coche de juguete robot Arduino?
La duración de la batería de un motor servo está determinada por el tipo de batería utilizada, la capacidad y el consumo de corriente del motor servo y de la placa Arduino. Las baterías de gran capacidad, como las baterías de polímero de litio, duran más. La vida útil de la batería también puede prolongarse minimizando el consumo de corriente del motor servo, por ejemplo, usándolo a bajo voltaje.
¿Cuáles son las ventajas de usar motores servo de Arduino en juguetes?
Los motores servo de Arduino son duraderos, ahorran energía y son eficientes. Ofrecen alta precisión y exactitud en el control del movimiento del robot. Los motores servo de Arduino utilizan señales de modulación por ancho de pulso (PWM) para el control, lo que asegura posicionamiento suave y preciso del eje del motor. Tienen un mecanismo de retroalimentación que proporciona un seguimiento en tiempo real de la posición, permitiendo un movimiento preciso y evitando sobrepasar o quedarse corto. Además, los motores servo son compactos y ligeros, lo que los hace ideales para su uso en juguetes donde el espacio es limitado.