
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(6 productos disponibles)
















 Listo para enviar
Listo para enviar


 Listo para enviar
Listo para enviar


Servomotor Arduino tiene varios tipos, que incluyen los siguientes:
Al elegir un servomotor para Arduino, considera los requisitos de par, velocidad y precisión de la aplicación. Asegúrate de que el servo tenga el par suficiente para manejar la carga. Para un movimiento suave y preciso, selecciona un servo que tenga la velocidad deseada y una retroalimentación de alta resolución. La compatibilidad con la placa Arduino es esencial, así que verifica la compatibilidad de voltaje y señal de control. Busca opciones de montaje robustas y flexibles, y asegúrate de que el servomotor sea durable y adecuado para uso tanto en interiores como en exteriores. Además, considera las condiciones ambientales donde se instalará el servo. Por ejemplo, si el entorno es hostil, opta por un motor sellado o a prueba de agua. También, busca servos con varias opciones de comunicación, como I2C, SPI y PWM, para facilitar la integración en diferentes sistemas.
Evalúa las opciones de suministro de energía, ya sea un suministro de energía separado o uno integrado. Esto asegura que el servomotor tenga suficiente energía para funcionar de manera eficiente. También, considera el tamaño y el peso del servomotor, especialmente para diseños compactos. Utilizar una impresora 3D para crear soportes y carcasas personalizadas para el servo puede mejorar el rendimiento y la estética. Además, analiza los costos y el presupuesto para todo el conjunto del proyecto. Opta por un motor confiable y eficiente que no sea muy costoso. Finalmente, considera la reputación del fabricante, lee reseñas y busca recomendaciones para asegurarte de que la calidad y el rendimiento del servomotor cumplan con las expectativas.
El servomotor Arduino más común se utiliza para construir juguetes, robots y otros dispositivos mecánicos. Es versátil y fácil de usar. El motor se puede controlar fácilmente para moverse a diferentes posiciones. Esto se hace enviando una señal desde la placa Arduino al servomotor. La señal enviada le indica al servomotor a qué posición debe moverse. Se puede usar para construir un brazo robótico, un coche de juguete o un pestillo de puerta. Cualquier aplicación que necesite moverse de manera precisa y controlada utiliza el servomotor Arduino.
Los servos tienen muchas características que los hacen adecuados para diferentes aplicaciones. Estas características incluyen:
Aumentos de voltaje
A veces, el voltaje suministrado al servomotor puede aumentar repentinamente. Esto puede ser causado por problemas en el cableado o cambios repentinos en el suministro de energía. Cuando hay un aumento de voltaje, puede dañar la placa Arduino y el servomotor conectado. Para prevenir esto, los usuarios deben asegurarse de que haya reguladores de voltaje y protectores contra sobrecargas en el circuito. Estos dispositivos ayudan a controlar el voltaje y protegen los componentes de cualquier aumento repentino.
Voltaje excesivo
Un alto voltaje suministrado a un servomotor puede quemar fácilmente la placa Arduino. Esto se debe a que los componentes de la placa no pueden manejar el calor adicional producido por el alto voltaje. Para evitar esto, los usuarios deben verificar siempre la clasificación de voltaje del servomotor y asegurarse de que el suministro de energía esté dentro de los niveles recomendados. Esto ayudará a proteger la placa Arduino de cualquier daño causado por voltaje excesivo.
Sobreintensidad
Cuando una corriente que fluye a través del circuito es demasiado para que la placa Arduino la maneje, puede causar sobreintensidad. Esto puede dañar fácilmente tanto la placa como el servomotor conectado. Para prevenir la sobreintensidad, los usuarios deben asegurarse de que las calificaciones de corriente del servomotor sean compatibles con la capacidad de la placa Arduino. Utilizar un multímetro para medir la corriente también puede ser útil para verificar que esté dentro de límites seguros.
Conclusiones cortocircuitos
Un cortocircuito ocurre cuando hay una conexión no intencionada entre dos puntos en el circuito. Esto crea un camino para que la corriente fluya, eludiendo los componentes y dañando la placa Arduino y el servomotor. Para evitar cortocircuitos, los usuarios deben inspeccionar cuidadosamente el cableado y las conexiones para asegurarse de que no haya cables sueltos o deshilachados que puedan provocar un cortocircuito. También es importante verificar el diagrama de cableado para garantizar que todas las conexiones sean correctas.
¿Qué es un servomotor Arduino?
Un servomotor Arduino es un motor que utiliza la placa Arduino para controlar el movimiento de un objeto. Se utiliza en diversas aplicaciones, como en robótica, donde ayuda a mover las partes del robot, y en coches a control remoto, para ayudar a conducir, girar y controlar las funciones del coche.
¿Cómo se conecta un servomotor a un Arduino?
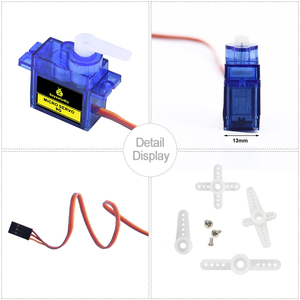
Se utilizan tres cables para conectar un servomotor a una placa Arduino: el cable de control, que es amarillo o blanco, indica al servo qué hacer; el cable de alimentación, generalmente rojo, proporciona energía al servo; y el cable de tierra, generalmente negro o marrón, completa el circuito. El cable de control se conecta a un pin digital en el Arduino, mientras que los otros dos se conectan a la alimentación y a tierra.
¿Puede cualquier servomotor funcionar con Arduino?
Sí, casi todos los servomotores pueden funcionar con Arduino, pero algunos pueden necesitar energía extra o conexiones diferentes. Es esencial elegir un servomotor compatible y verificar sus especificaciones para asegurarse de que funcione bien con la placa Arduino.
¿Por qué son útiles los servomotores Arduino?
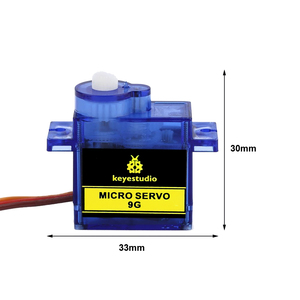
Los servomotores son útiles porque son precisos y permiten al usuario controlar la posición, velocidad y dirección del movimiento de un objeto. También son compactos y pueden caber en espacios pequeños, lo que los hace ideales para aplicaciones que requieren un movimiento preciso y controlado en áreas limitadas.



















