All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(495 productos disponibles)




































 Ready to Ship
Ready to Ship


















 Ready to Ship
Ready to Ship









































































 Ready to Ship
Ready to Ship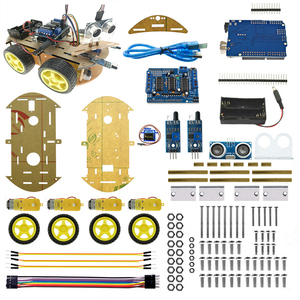













 Ready to Ship
Ready to Ship




Los robots Arduino de tracción en las cuatro ruedas (4WD) son máquinas versátiles y robustas que encuentran aplicaciones en diversos campos, incluyendo investigación, educación y entretenimiento. Se utilizan para explorar terrenos difíciles, incluyendo montañas, bosques y pistas todoterreno. Además, se utilizan en operaciones de búsqueda y rescate, así como en investigaciones para estudiar los cambios ambientales y el comportamiento de la vida silvestre. Estos robots ofrecen experiencias de aprendizaje prácticas, permitiendo a los estudiantes adquirir habilidades prácticas en programación, electrónica e ingeniería mecánica. También se pueden personalizar para proyectos específicos, permitiendo a los usuarios añadir sensores, cámaras y otros equipos para mejorar su funcionalidad. Además, los robots Arduino 4WD se utilizan en competiciones y actividades recreativas, proporcionando una plataforma para la creatividad y la innovación.
Los robots Arduino 4WD son plataformas versátiles para explorar la robótica y la automatización. Estas máquinas vienen en diferentes tipos, cada uno diseñado para aplicaciones y funcionalidades específicas. Comprender los tipos de robots Arduino con 4WD permite a los entusiastas elegir el adecuado para sus proyectos y personalizarlo para satisfacer sus necesidades.
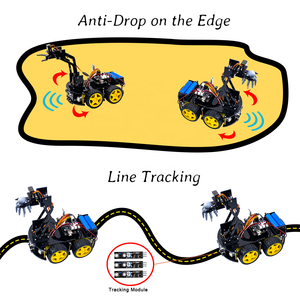
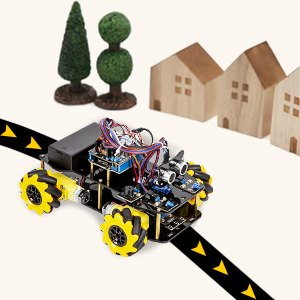
Robots de seguimiento de línea:
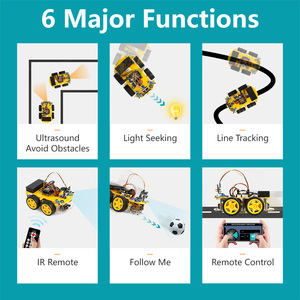
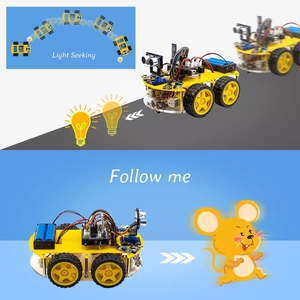
Los robots de seguimiento de línea se desarrollan para moverse a lo largo de un camino específico. Estos robots se utilizan en la educación para enseñar conceptos de robótica y programación. También se utilizan en aplicaciones prácticas como sistemas de entrega automatizados y tareas de inspección en las industrias. Estos robots se pueden personalizar para seguir patrones complejos e integrar sensores adicionales para la detección y elusión de obstáculos. Esto aumenta sus capacidades y amplía sus aplicaciones. Además, se pueden emplear en competiciones, permitiendo a los entusiastas mostrar sus habilidades de codificación e ingeniería en desafíos de seguimiento de línea.
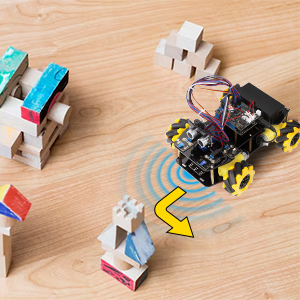
Robots de evitación de obstáculos:
Los robots de evitación de obstáculos están diseñados para moverse libremente en un entorno. Estos robots se utilizan ampliamente en las industrias para la manipulación de materiales, inspecciones y tareas de vigilancia. Se pueden adaptar para trabajar en entornos dinámicos, permitiendo ajustes de ruta en tiempo real e integrando sensores avanzados para una mejor detección de obstáculos. Estos robots se utilizan en competiciones donde los participantes demuestran su experiencia en ingeniería y programación en desafíos de evitación de obstáculos. Estas máquinas tienen aplicaciones en entornos domésticos para tareas de limpieza y en investigación para la recopilación de datos en entornos no estructurados.
Robots controlados por control remoto:
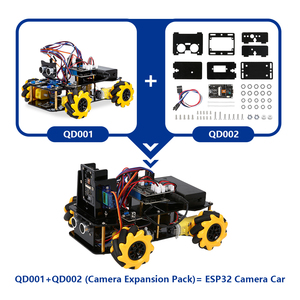
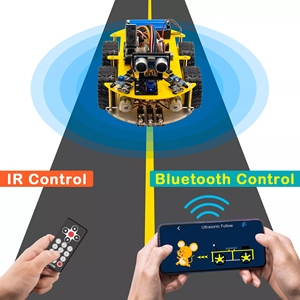
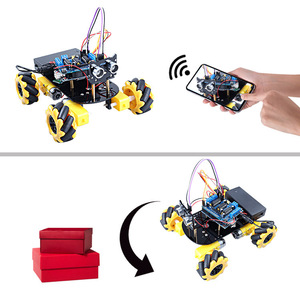
Los robots controlados por control remoto se operan a través de dispositivos externos como teléfonos inteligentes, computadoras y consolas de juegos. Tienen aplicaciones en el entretenimiento, como los juegos, y en entornos educativos donde se utilizan en proyectos de codificación y electrónica. Además, se pueden personalizar para integrar varios sensores y cámaras, mejorando así su funcionalidad. Estos robots se pueden utilizar en competiciones donde los participantes demuestran sus habilidades de ingeniería y programación. Además, se pueden implementar en tareas del mundo real como vigilancia e inspecciones, extendiendo su utilidad más allá del entretenimiento.
Robots de vigilancia:
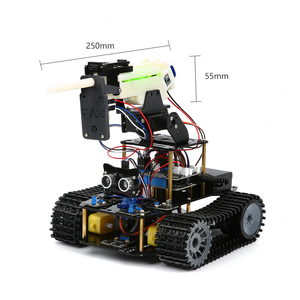
Los robots de vigilancia se desarrollan para tareas de monitoreo e inspección. Estos robots están equipados con cámaras y sensores para mejorar sus capacidades de monitoreo. Esto los hace ideales para fines de seguridad. También se pueden utilizar en entornos que son demasiado peligrosos para que los humanos ingresen. Los robots de vigilancia 4WD son personalizables. Los usuarios pueden agregar cámaras térmicas, detectores de movimiento y otros sensores para mejorar la funcionalidad. Estos robots también se pueden programar para detectar intrusiones y enviar alertas en tiempo real, lo que los convierte en herramientas valiosas para medidas de seguridad proactivas.
Robots mineros:
Los robots mineros están diseñados específicamente para tareas relacionadas con la minería. Estos robots son robustos y duraderos, lo que les permite operar en entornos desafiantes. Los robots mineros pueden equiparse con cámaras, sensores de gas y detectores de radiación para mejorar sus capacidades de monitoreo e inspección. También se pueden controlar de forma remota o programar para que funcionen de forma autónoma, garantizando la seguridad en entornos que son peligrosos para que los humanos ingresen. Además, son útiles en la investigación para el monitoreo ambiental y la recopilación de datos en terrenos de difícil acceso.
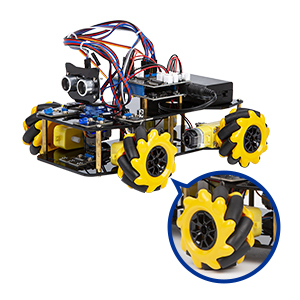
Al seleccionar un robot Arduino 4WD, es necesario tener en cuenta varios factores para garantizar que se ajuste al propósito previsto y ofrezca el rendimiento deseado. Se debe comenzar observando la versatilidad del terreno del robot. Estos robots son excelentes para terrenos irregulares como grava, tierra y rocas. También tienen mejor rendimiento y tracción en terrenos irregulares que los robots de dos ruedas motrices. Estos robots pueden navegar por terrenos desafiantes. También son adecuados para superficies interiores y lisas. Se pueden adaptar fácilmente a diferentes terrenos.
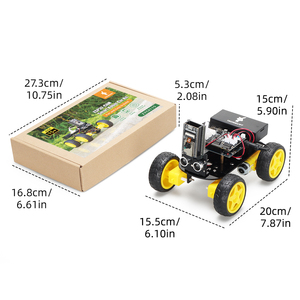
También se debe considerar el tamaño del robot y su capacidad de carga. Esto es importante cuando se utiliza el robot para aplicaciones específicas. El tamaño del robot determina el peso que puede transportar. Si el robot se va a utilizar para aplicaciones específicas, es importante llevar equipo adicional para garantizar que esté diseñado para adaptarse al propósito previsto. El diseño y la construcción del robot también son importantes para garantizar que sea duradero y pueda soportar el uso previsto. Debe ser lo suficientemente resistente para manejar el manejo brusco durante la operación.
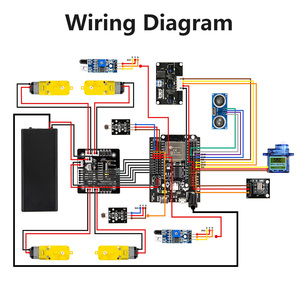
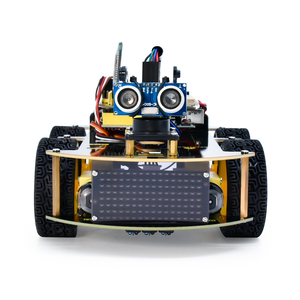
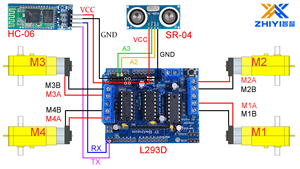
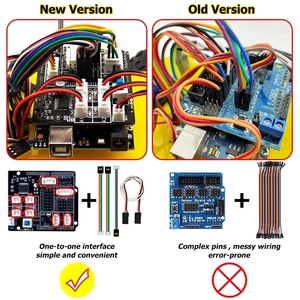
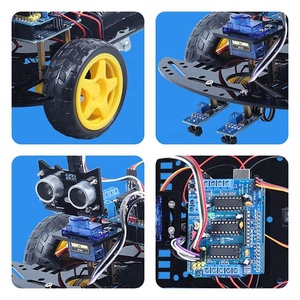
También se debe considerar el tipo de sensores y su ubicación. Los sensores son esenciales para detectar obstáculos y garantizar que el robot siga la ruta deseada. Los sensores deben montarse en los ángulos correctos para garantizar que el robot pueda detectar rápidamente los obstáculos. Esto mejorará la capacidad del robot para navegar sin problemas sin golpear los obstáculos. Los robots Arduino 4WD se controlan mediante varios métodos, como Bluetooth, Wi-Fi, RF y mediante aplicaciones móviles. Se debe seleccionar el método de control más conveniente y fácil de usar para garantizar una conexión fluida entre el usuario y el robot. Un robot con una interfaz simple y fácil de usar es fácil de programar y operar.
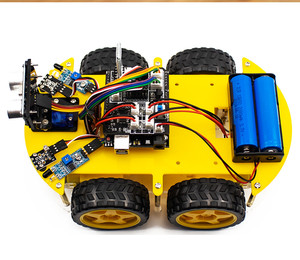
El sistema de alimentación del robot es importante, ya que determina su rendimiento. Cuando se utiliza un robot Arduino 4WD, elija uno con una batería potente que dure mucho tiempo y pueda manejar trabajos pesados. También se debe considerar el tipo de motor del robot y su nivel de rendimiento. Los motores sin escobillas son los mejores para estos robots, ya que ofrecen mejor eficiencia, mayor duración y mejor rendimiento.
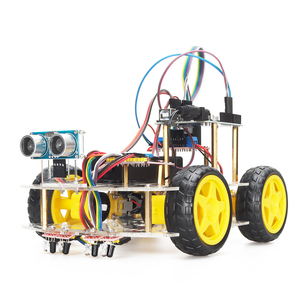
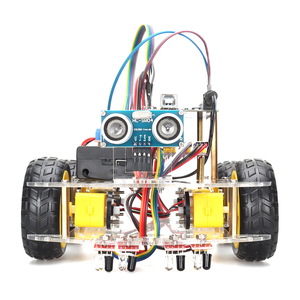
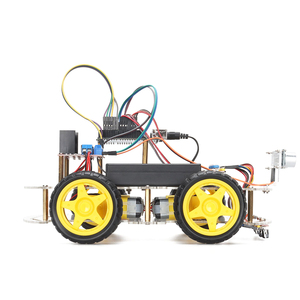
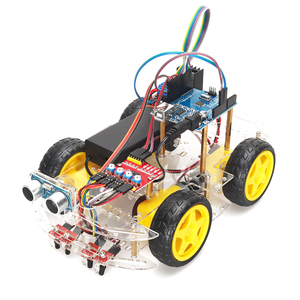
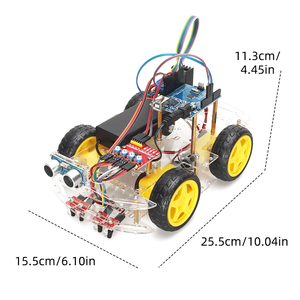
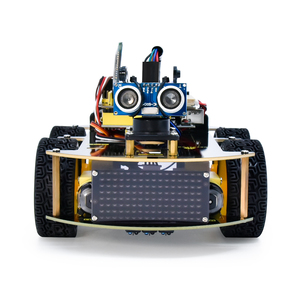
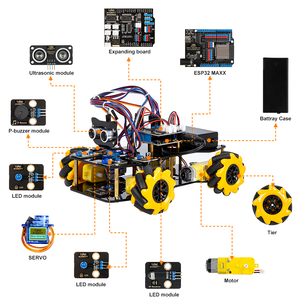
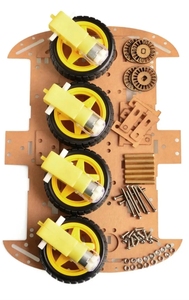
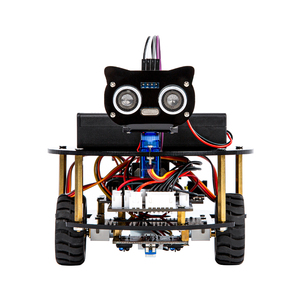
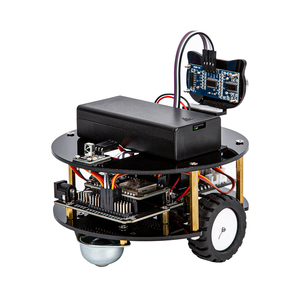
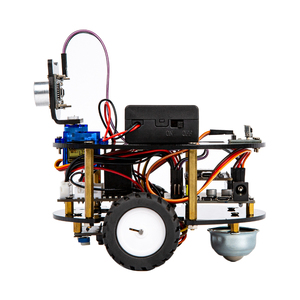
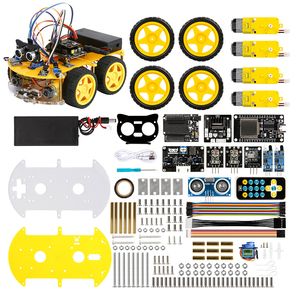
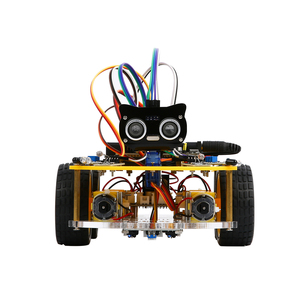
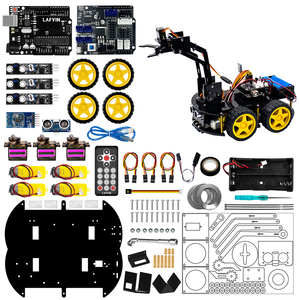
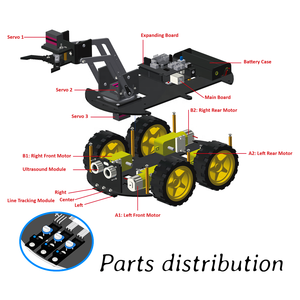
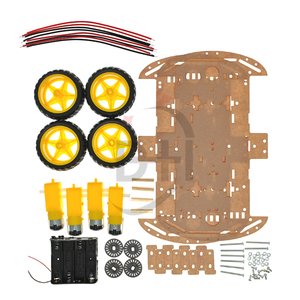
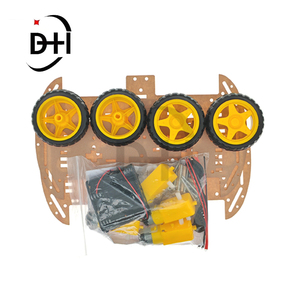
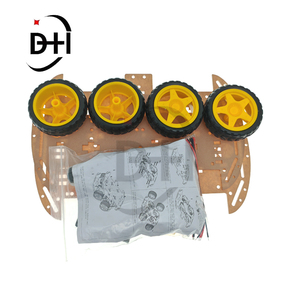
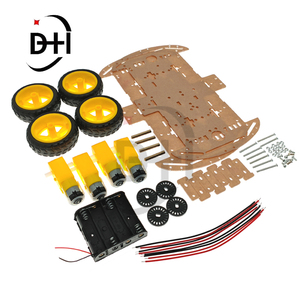
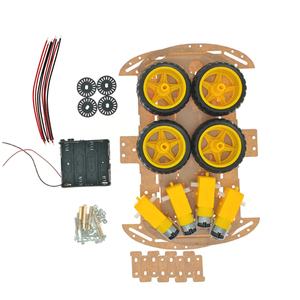
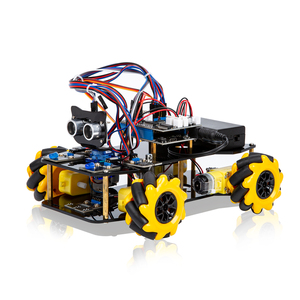
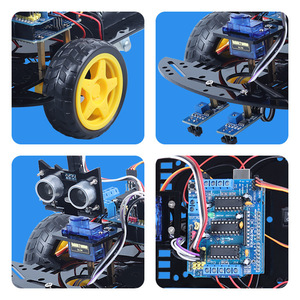
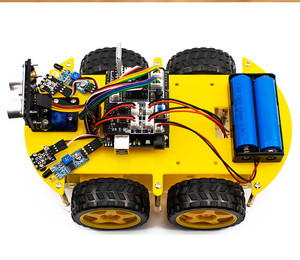
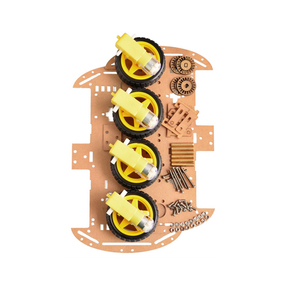
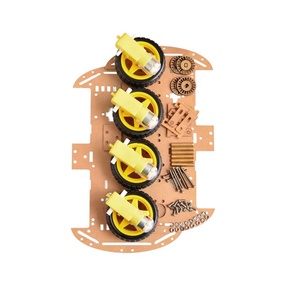
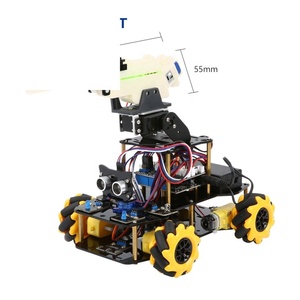
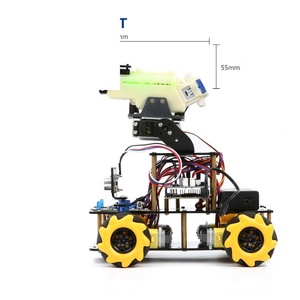
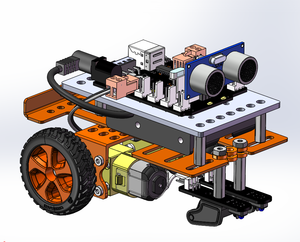
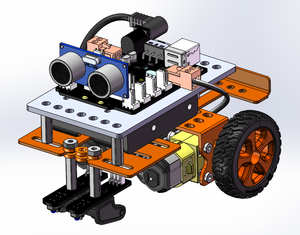
El diseño del robot Arduino 4WD se basa en un mecanismo de tracción en las cuatro ruedas que garantiza que las cuatro ruedas reciban energía e impulsen al robot para que se mueva. El robot está diseñado con dos pares de ruedas en sus lados derecho e izquierdo, que son paralelos entre sí. Este tipo de diseño garantiza que el robot pueda moverse rápido y sea estable al girar. La característica del robot Arduino 4WD es que utiliza Arduino como su placa de microcontrolador, lo que lo hace programable. Además, tiene un sistema de tracción en las cuatro ruedas que presenta cuatro ruedas, dos ruedas de dirección y dos ruedas motrices. Este robot tiene un diseño que presenta el chasis en la parte inferior, el cuerpo principal en la parte superior y las ruedas en los lados. También tiene una fuente de alimentación y un sistema de control, que son las baterías y la placa Arduino, respectivamente. El cuerpo está diseñado para ser plano y rectangular para facilitar el montaje de los componentes, mientras que las ruedas de dirección están diseñadas para ayudar a equilibrar el robot. Las ruedas motrices están diseñadas para ser accionadas por motores para que el robot pueda moverse en todas direcciones. El robot Arduino 4WD utiliza 4WD porque es estable, tiene buena tracción y puede trepar juguetes.
La construcción de un robot Arduino 4WD requiere tener en cuenta las medidas de seguridad para proteger tanto al robot como a su entorno, así como a las personas involucradas en su construcción y funcionamiento. Estas son algunas consideraciones clave de seguridad:
Gestión de la energía
Utilice reguladores de voltaje adecuados para garantizar que el Arduino y otros componentes reciban energía estable.
Implemente protección contra sobrecorriente, como fusibles o interruptores automáticos, para evitar daños por corriente excesiva.
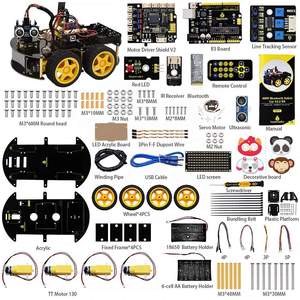
Selección de componentes
Elija componentes que estén clasificados para los voltajes y corrientes que se utilizarán en el robot.
Utilice proveedores acreditados y lea detenidamente las especificaciones para garantizar que las piezas sean apropiadas para la aplicación.
Seguridad física
Mantenga el área de trabajo ordenada y libre de desorden para evitar accidentes y daños a los componentes.
Cuando utilice herramientas, use equipo de seguridad adecuado, como gafas, guantes y mascarillas si es necesario.
Seguridad electrónica
Evite trabajar en circuitos cuando estén energizados para evitar descargas eléctricas y daños a los componentes.
Los condensadores deben descargarse correctamente antes de trabajar en circuitos de alto voltaje para evitar descargas eléctricas.
Pruebas y creación de prototipos
Ensamble el robot en su totalidad antes de ensamblarlo por completo. Pruebe las piezas pequeñas primero para garantizar su funcionalidad.
Pruebe los nuevos circuitos y diseños en una placa de pruebas o una placa de prototipos antes de implementarlos en el robot.
Para garantizar que se construya un robot Arduino 4WD, es importante cumplir con las pautas de calidad para garantizar la funcionalidad, la durabilidad y el rendimiento. Estas son algunas consideraciones clave:
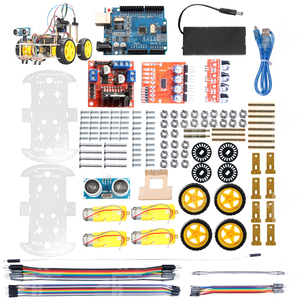
Calidad de los componentes
Opte por placas Arduino, motores, controladores de motores y otros componentes de alta calidad de fuentes confiables. Esto minimiza el riesgo de mal funcionamiento y mejora la calidad general del robot.
Precisión y exactitud
El diseño y la construcción del robot deben realizarse con precisión. Esto debe incluir mediciones precisas, alineación adecuada y cableado ordenado.
Es recomendable utilizar una impresora 3D para piezas que requieren alta precisión, como soportes de montaje, ruedas y otros accesorios.
Calidad del código
Asegúrese de que el código escrito para el Arduino sea eficiente, bien estructurado y probado a fondo. Esto garantiza un funcionamiento fluido y minimiza el riesgo de problemas relacionados con el software.
Gestión de baterías
Las baterías deben elegirse en función de su capacidad y voltaje para garantizar que se ajusten a los requisitos de energía del robot. Deben emplearse técnicas adecuadas de gestión de baterías para garantizar que la carga, la descarga y el mantenimiento se realicen de manera adecuada para maximizar la duración y el rendimiento de la batería.
Pruebas e iteración
Deben realizarse pruebas exhaustivas del robot para identificar y solucionar cualquier problema o problema. Deben probarse diferentes entornos y escenarios para garantizar un rendimiento constante. El robot debe mejorarse mediante iteraciones basadas en la retroalimentación obtenida de las pruebas para mejorar su calidad y funcionalidad.
¿Qué es 4WD en un robot Arduino?
Tracción en las cuatro ruedas (4WD) significa que el robot tiene ruedas en sus cuatro esquinas. Todas las ruedas están accionadas por motores para que puedan moverse sobre diferentes superficies.
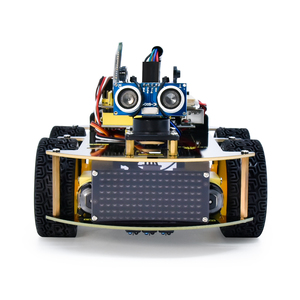
¿Puede el robot Arduino 4WD evitar obstáculos?
Sí, puede. El robot utiliza sensores ultrasónicos para detectar cualquier obstáculo en su camino. Puede cambiar automáticamente de dirección y evitar colisiones.
¿Cuál es la velocidad máxima de un robot Arduino 4WD?
El robot tiene una velocidad máxima de 0,8 m/s. Puede moverse más rápido o más lento, dependiendo de la superficie sobre la que esté rodando.
¿Cuánto tiempo funciona el robot Arduino 4WD con energía?
El robot puede funcionar durante 4 horas con energía. Utiliza una batería de litio de 7,4 V para horas de trabajo continuas más largas.