All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1484 productos disponibles)


















 Ready to Ship
Ready to Ship






































 Ready to Ship
Ready to Ship





















 Ready to Ship
Ready to Ship

















 Ready to Ship
Ready to Ship












 Ready to Ship
Ready to Ship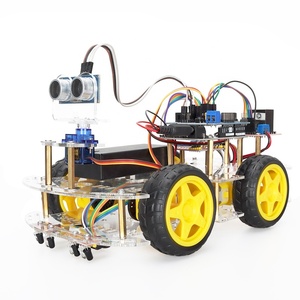































 Ready to Ship
Ready to Ship





















Los robots controlados por Arduino vienen en varias formas, cada uno ofreciendo funcionalidades y aplicaciones distintas. Aquí hay algunos tipos de robots controlados por Arduino con breves descripciones:
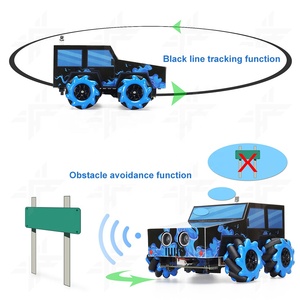
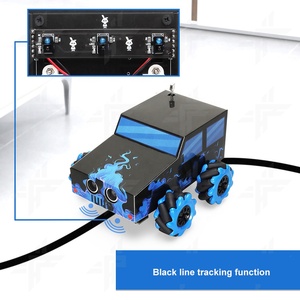
Robots que siguen líneas
Estos robots están diseñados para seguir una línea específica, a menudo negra, en una superficie contrastante, típicamente blanca. Se utilizan ampliamente en entornos educativos para impartir lecciones sobre sensores y sistemas de control. Los robots incorporan sensores infrarrojos (IR) que detectan la línea y ajustan su movimiento en consecuencia. Esto asegura que se mantengan en la línea. Se emplean comúnmente en competencias.
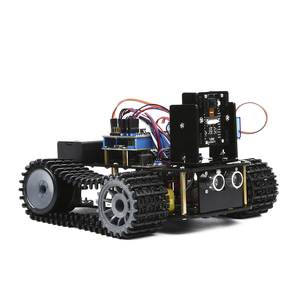
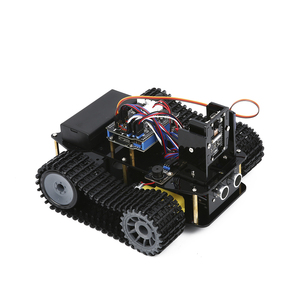
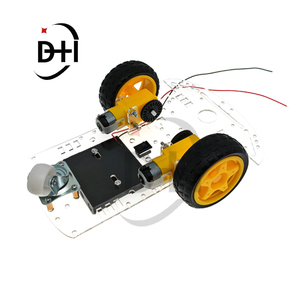
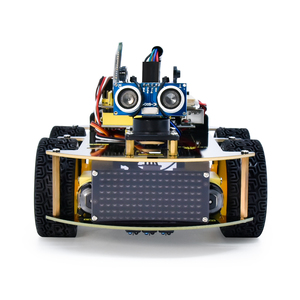
Robots de evitación de obstáculos
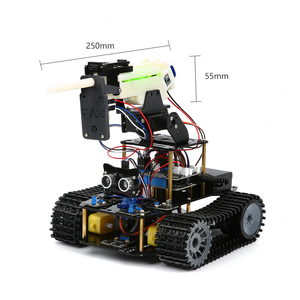
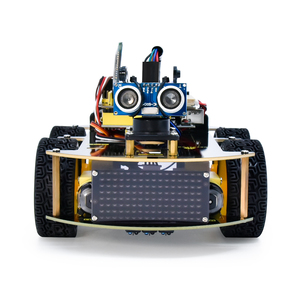
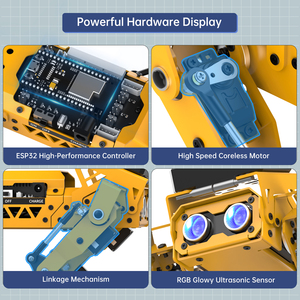
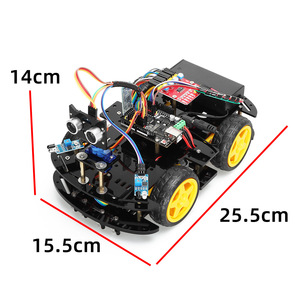
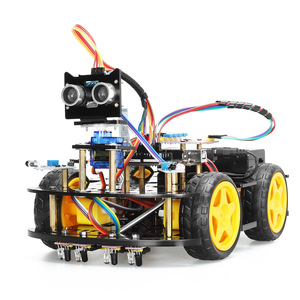
Los robots de evitación de obstáculos pueden navegar por su entorno detectando y eludiendo obstáculos. Estos robots controlados por Arduino utilizan sensores ultrasónicos para medir la distancia entre el robot y posibles obstáculos delante. Cuando se detecta un obstáculo, el robot modifica su trayectoria, asegurando una experiencia de viaje fluida y sin interrupciones.
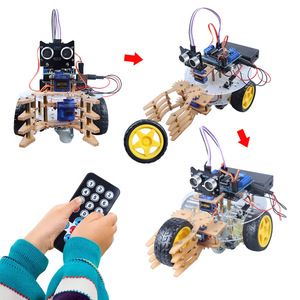
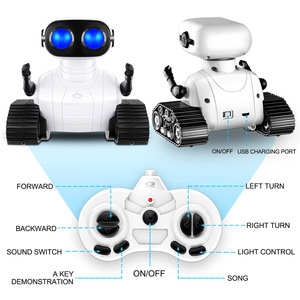
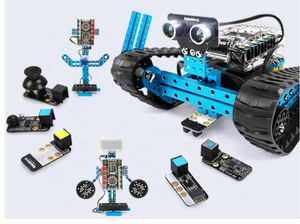
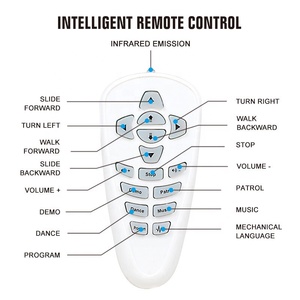
Robots controlados de forma remota
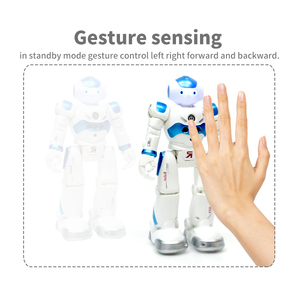
Los robots controlados de forma remota permiten a los usuarios comandar sus movimientos desde una distancia a través de varios sistemas de control como RF, Bluetooth o Wi-Fi. El operador envía comandos usando un control remoto, un smartphone o una computadora, y el robot responde ejecutando las acciones especificadas. Tales robots son ideales para exploración y vigilancia en áreas que pueden ser riesgosas para que los humanos entren.
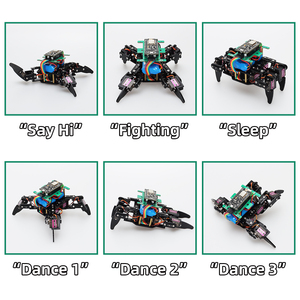
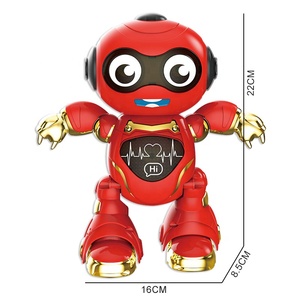
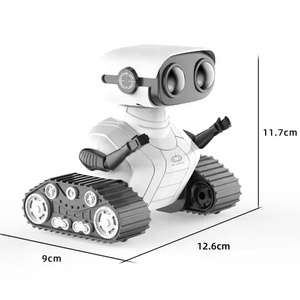
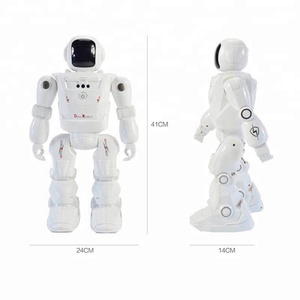
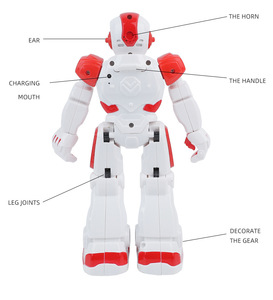
Robots humanoides
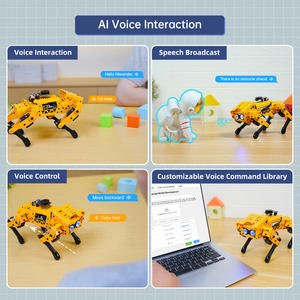
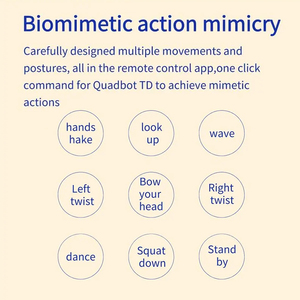
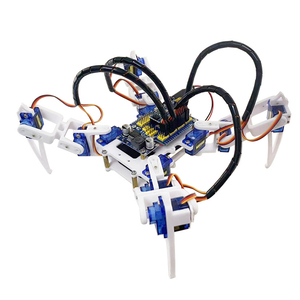
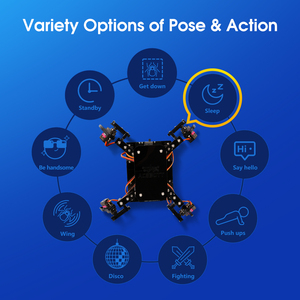
Los robots humanoides están diseñados para imitar estructuras y movimientos similares a los humanos. Estas máquinas pueden ser programadas para realizar diversas tareas como caminar, hablar y responder a interacciones humanas. Se utilizan para la investigación en inteligencia artificial, interacción humano-robot y aplicaciones sociales.
Robots controlados por GPS
Los robots controlados por GPS utilizan módulos GPS para navegación y posicionamiento. Estos robots pueden ser programados para seguir coordenadas GPS específicas, lo que los hace adecuados para aplicaciones al aire libre como agricultura, topografía y mapeo. Su precisión y fiabilidad en entornos abiertos dependen en gran medida de las señales satelitales.
Antes de comprar robots en venta, los propietarios de negocios deben considerar el nivel de habilidad requerido para operar el robot. Los robots amigables para principiantes son fáciles de programar y controlar. Vienen con instrucciones detalladas y a menudo tienen comunidades activas que ofrecen soporte. Los robots intermedios y avanzados permiten a los compradores explorar características de programación y personalización más complejas. Estos robots soportan varios sensores, lenguajes de programación avanzados y sistemas de control intrincados. Tales máquinas son ideales para usuarios que buscan mejorar sus habilidades y profundizar en la robótica. Idealmente, estos robots tienen una curva de aprendizaje pronunciada, pero son más gratificantes en términos de las habilidades y el conocimiento que proporcionan.
Los juguetes controlados por robots utilizan baterías como su fuente de energía principal. Tienen baterías recargables que pueden ser cargadas y sustituidas cuando sea necesario. Los compradores deben verificar la duración de la batería de los robots que planean adquirir. Los juguetes con larga duración de batería aseguran sesiones de juego o trabajo ininterrumpidas. Los robots con poca duración de batería necesitan cargas frecuentes, lo que puede ser frustrante. Además, la duración de la batería varía según el uso. Cuando se utilizan en configuraciones más altas, la batería se agotará más rápido. De manera similar, el tiempo de espera será más corto cuando el robot esté constantemente activo. Los robots a batería también tendrán una duración de vida útil más corta con el tiempo. Esto se debe a que la batería se deteriora con el tiempo, afectando el rendimiento general del robot.
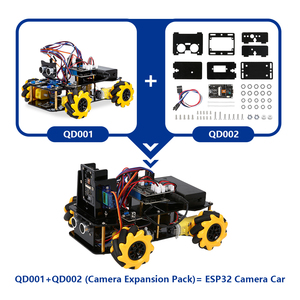
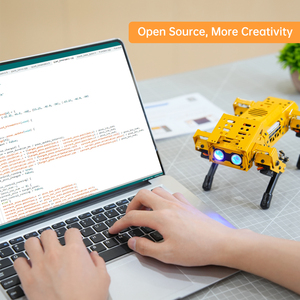
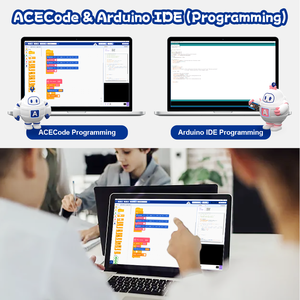
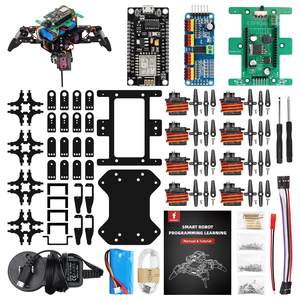
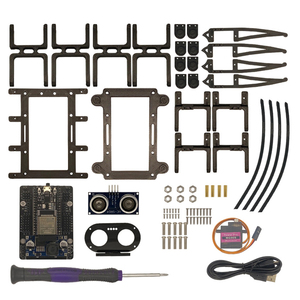
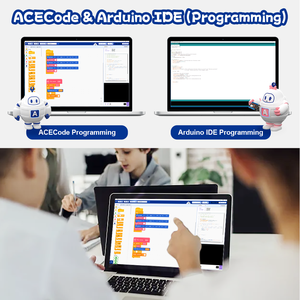
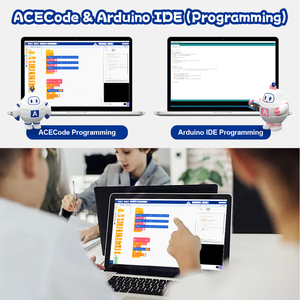
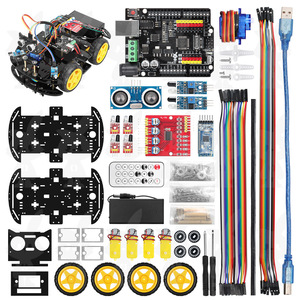
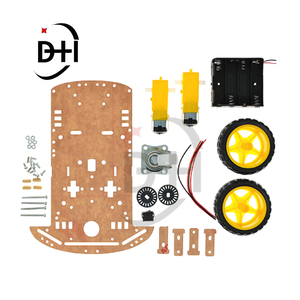
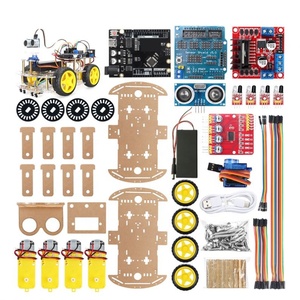
Diferentes robots controlados por Arduino están diseñados para realizar tareas específicas. Algunos pueden ser utilizados para enseñar codificación y programación. Son personalizables y pueden ser programados para ejecutar diversos comportamientos y funciones. Otros robots están diseñados para la exploración. Pueden ser equipados con sensores y cámaras que les permiten navegar por entornos de forma autónoma. Los compradores deben adquirir robots que sean fáciles de configurar y ensamblar. Tales robots vienen con instrucciones claras y kits bien diseñados que incluyen todas las partes y componentes necesarios. Además, los compradores deben considerar la disponibilidad de piezas de repuesto y accesorios. Esto es porque algunos robots podrían requerir reparaciones después de un corto período de uso.
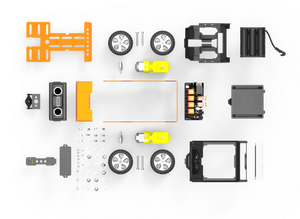
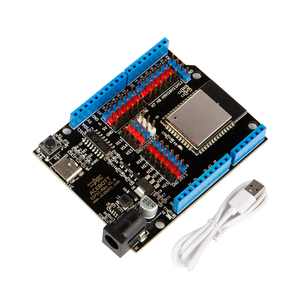
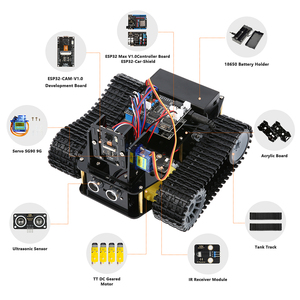
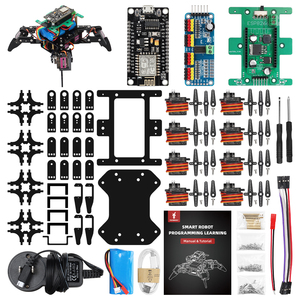
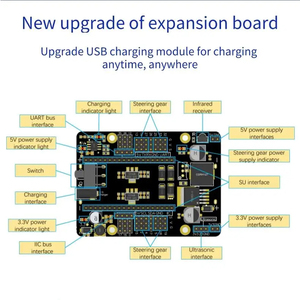
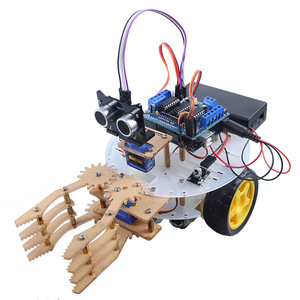
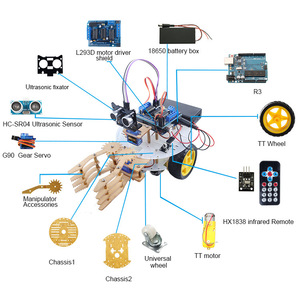
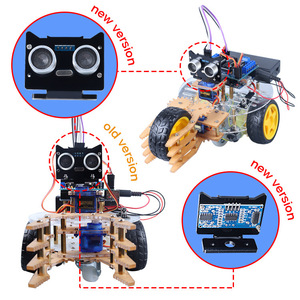
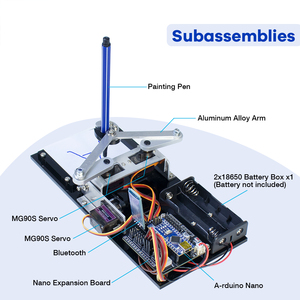
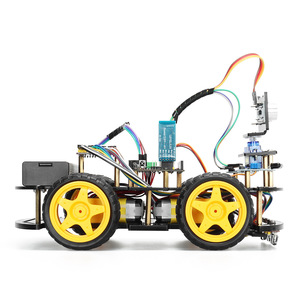
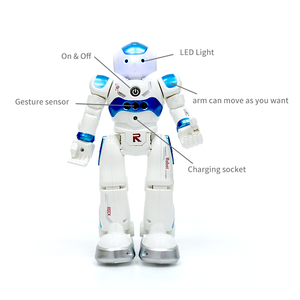
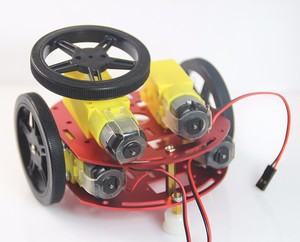
El diseño de un robot controlado por Arduino consta de varios elementos vitales que contribuyen a su funcionalidad y características. El elemento central del robot es la placa Arduino, que actúa como el cerebro, controlando los movimientos y acciones del robot. Está acompañada de sensores, que son cruciales para permitir que el robot perciba su entorno y responda a diversos estímulos. Por ejemplo, los sensores de proximidad permiten al robot detectar obstáculos, mientras que los sensores de temperatura pueden medir niveles de calor. Estos sensores amplían las capacidades y aplicaciones del robot.
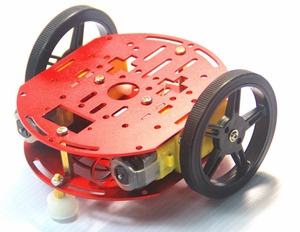
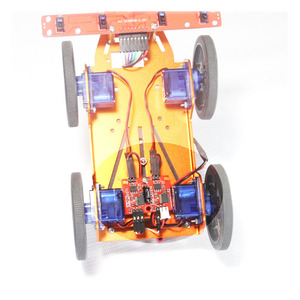
Además, los actuadores y motores son componentes esenciales en el diseño, ya que proporcionan la energía necesaria para el movimiento del robot. Son responsables de traducir los comandos de la placa Arduino en movimiento físico, permitiendo que el robot avance, retroceda y cambie de dirección. Además, la estructura y chasis del robot juegan un papel significativo al albergar todos estos componentes, proporcionando estabilidad y soporte al robot.
El diseño también incorpora una fuente de alimentación, que es necesaria para mantener al robot en funcionamiento. La fuente de alimentación asegura que todos los componentes reciban la energía requerida para funcionar de manera efectiva. Otro aspecto importante del diseño es el módulo de comunicación, que permite el control y monitoreo inalámbrico del robot. Este módulo permite al operador enviar comandos y recibir retroalimentación del robot, mejorando su versatilidad y usabilidad.
Además de estos componentes fundamentales, el diseño de un robot controlado por Arduino puede ser personalizado para incluir otros elementos basados en su propósito y aplicación prevista. Por ejemplo, un robot utilizado con fines educativos puede tener un diseño más simplificado, mientras que uno utilizado para aplicaciones industriales puede ser más complejo y sofisticado.
¿Qué tipos de motores se utilizan en los robots controlados por Arduino?
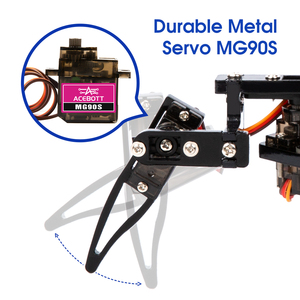
Los robots controlados por Arduino comúnmente utilizan motores de corriente continua, motores paso a paso y servomotores. Cada tipo de motor tiene características únicas y se elige según la aplicación y los requisitos de rendimiento del robot. Por ejemplo, los motores de corriente continua de rotación continua son ideales para robots con ruedas que requieren movimientos rápidos hacia adelante o hacia atrás. Los servomotores son adecuados para aplicaciones que necesitan alta precisión y repetibilidad en el posicionamiento, como brazos robóticos. También ofrecen baja inercia y alto torque a bajas velocidades.
¿Cuál es el propósito de un controlador de motor en un robot controlado por Arduino?
Un controlador de motor es un componente crucial de un robot controlado por Arduino porque actúa como una interfaz entre la placa Arduino y los motores. Permite que la Arduino controle la dirección y velocidad de los motores, mientras proporciona la corriente y voltaje necesarios para impulsarlos. El controlador de motor protege a la Arduino de picos de alta tensión y corriente generados cuando los motores se encienden y apagan, lo cual podría dañar la placa. También permite el uso de diferentes tipos de motores, incluidos motores de corriente continua, motores paso a paso y servomotores, que requieren diferentes métodos de control.
¿Cómo se integran los sensores en robots controlados por Arduino?
Los sensores se integran en los robots controlados por Arduino conectándolos a la placa Arduino a través de sus pines de entrada/salida. Los sensores son elegidos según la aplicación prevista del robot y son utilizados para detectar diversas condiciones ambientales, como temperatura, luz, proximidad y obstáculos. Una vez que los sensores están conectados, la Arduino puede leer los datos del sensor usando sus funciones de entrada analógica o digital. Los datos obtenidos son luego procesados por la Arduino para tomar decisiones y controlar el comportamiento del robot.
¿Cuáles son algunas aplicaciones comunes de los robots controlados por Arduino?
Los robots controlados por Arduino tienen un amplio rango de aplicaciones en varios campos, incluyendo educación, automatización y entretenimiento. En educación, se utilizan para enseñar a los estudiantes sobre programación, electrónica y robótica a través de proyectos prácticos. En automatización, los robots de Arduino se emplean para tareas como vigilancia, inspección y monitoreo en entornos peligrosos. También pueden ser utilizados para automatización del hogar para controlar electrodomésticos y realizar tareas repetitivas. Además, los robots controlados por Arduino se utilizan en competiciones, proyectos de hobby y como una fuente de entretenimiento.